Shuji Oishi | 大石 修士
Senior researcher @ National Institute of Advanced Industrial Science and Technology (AIST)
A member of Smart Mobility Reasearch Team (SMRT) in DigiARC research center.

![]()

![]()
- shuji.oishi [at] aist.go.jp
- Tsukuba Central 2, 1-1-1 Umezono, Tsukuba, Ibaraki, 305-8568, JAPAN
- カメラ位置同定,視線計測に関する共同研究・IPの有償提供などは産総研窓口へご相談下さい.
News
- 2023.07 - テレビ東京 モーニングサテライト 大浜見聞録に出演しました.
- 2023.01 - Our papers, L-C* and Target-less Calibration were accepted to ICRA2023.
- 2021.07 - Our paper, 4D Attention was accepted to IEEE RA-L.
- 2021.07 - Our paper, Adaptive Parameter Tuning was accepted to IROS2021.
- 2021.03 - Our papers, LiTAMIN2, VGICP, and Automatic Parameter Tuning, were accepted to ICRA2021.
- 2020.10 - Our paper LiDAR-intensity free pedestrian detection was accepted to ICPR2020.
- 2020.10 - Our paper Interactive SLAM was accepted to IEEE RA-L.
- 2020.07 - Our papers C* and LiTAMIN were accepted to IROS2020.
- 2020.06 - Our paper C*: Cross-modal Simultaneous Tracking And Rendering was accepted to IEEE RA-L.
- 2019.09 - Our paper As Symmetric As Possible was accepted to Humanoids2019.
- 2019.03 - Our paper "VITAMIN-E was accepted to CVPR2019.
- 2019.02 - Our paper Thermal Comfort Measurement was accepted to Pattern Recognition Letters.
- 2018.11 - Our paper SeqSLAM++ was accepted to Robotics and Automation Systems.
- 2018.06 - Our paper Generating Adaptive Attending Behaviors was accepted to IROS2018.
- 2018.04 - Started to work in National Institute of Advanced Industrial Science and Technology (AIST).
Projects

L-C*: Visual-inertial Loose Coupling for Resilient and Lightweight Direct Visual Localization
Shuji Oishi, Kenji Koide, Masashi Yokozuka, Atsuhiko Banno
2023 IEEE International Conference on Robotics and Automation (ICRA2023)
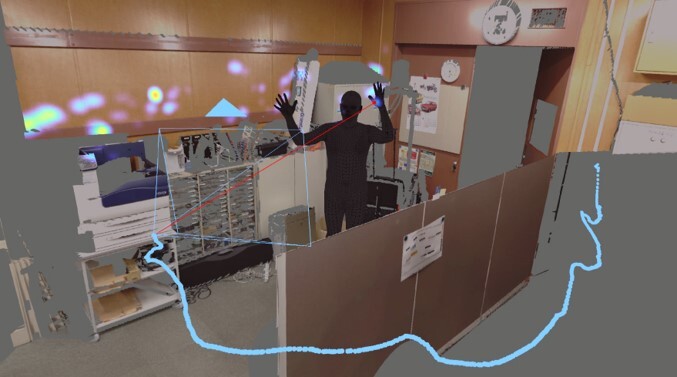
4D Attention: Comprehensive Framework for Spatio-Temporal Gaze Mapping
Shuji Oishi, Kenji Koide, Masashi Yokozuka, Atsuhiko Banno
IEEE Robotics and Automation Letters, 2021
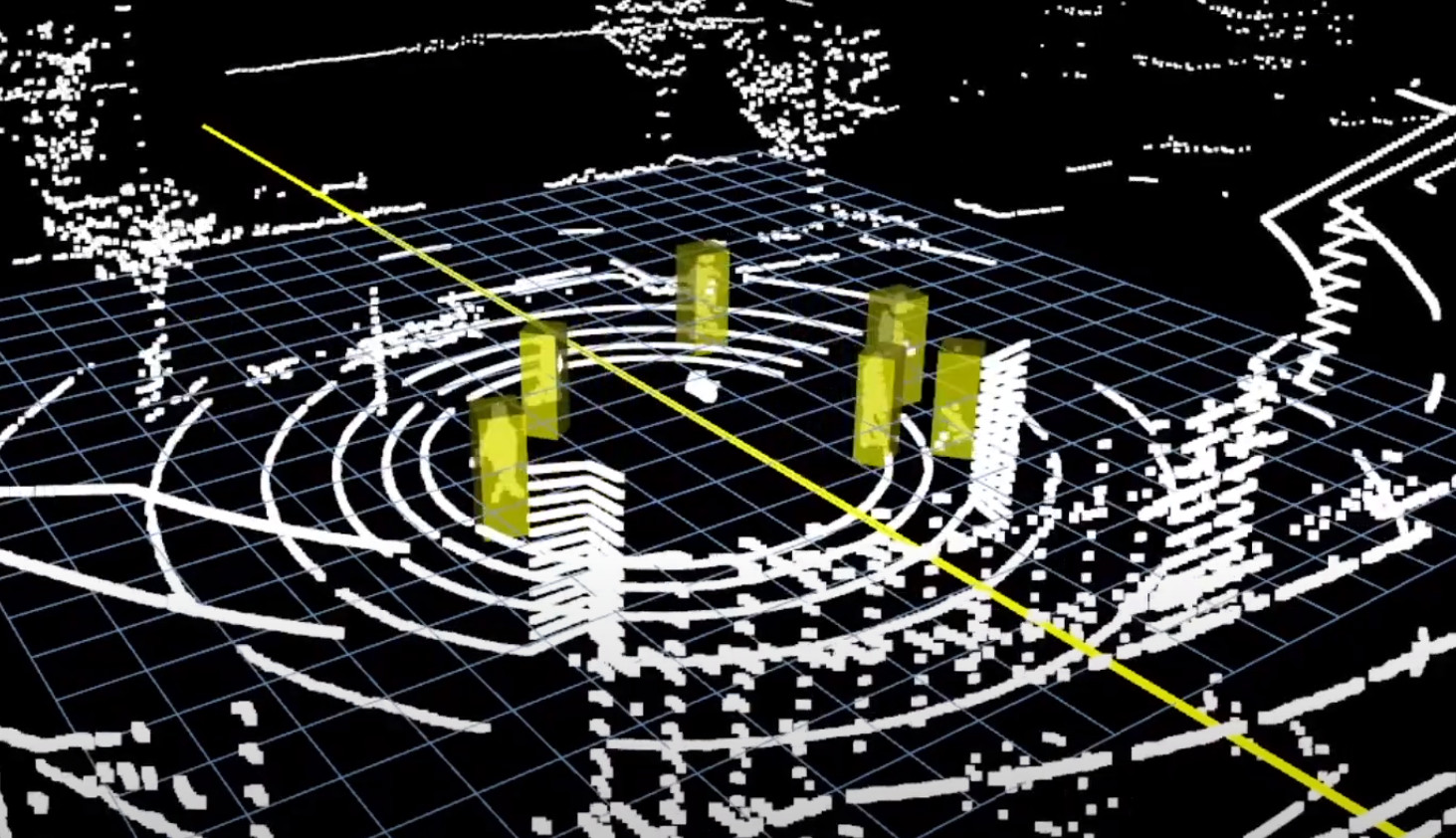
Sensor-independent Pedestrian Detection for Personal Mobility Vehicles in Walking Space Using Dataset Generated by Simulation
Takahiro Shimizu, Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno, Motoki Shino
25th International Conference on Pattern Recognition (ICPR2020)
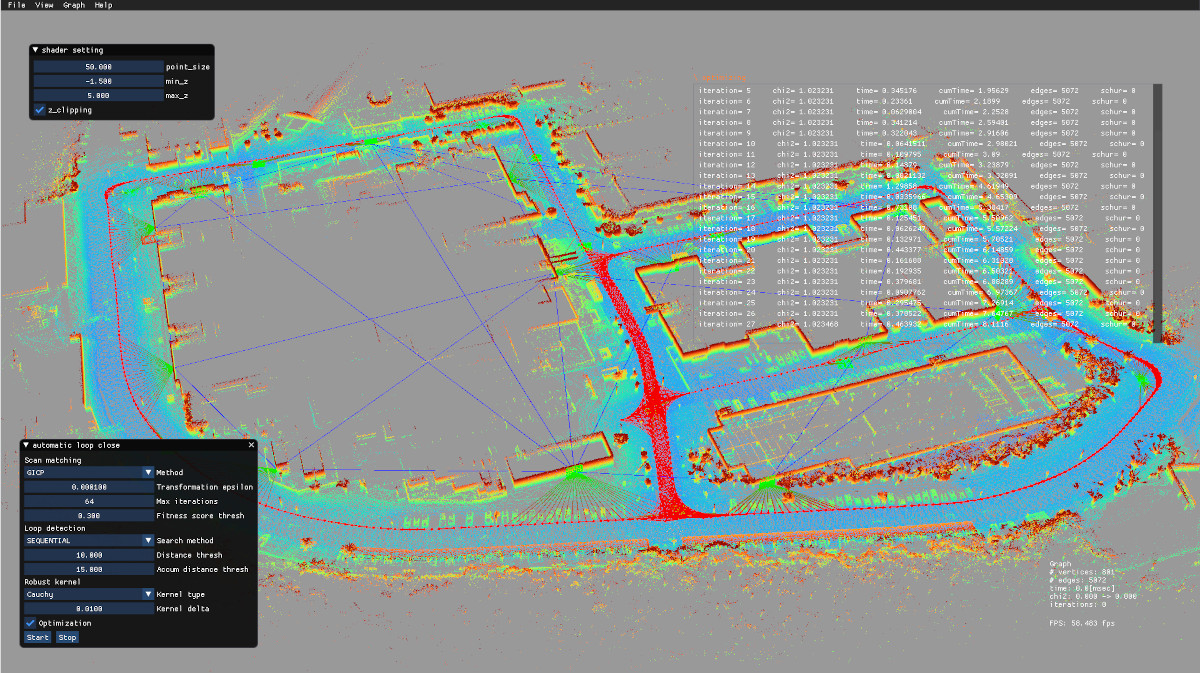
Interactive 3D Graph SLAM for Map Correction
Kenji Koide, Jun Miura, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno
IEEE Robotics and Automation Letters (RA-L) 2020
LiTAMIN: LiDAR based Tracking And MappINg by Stabilized ICP for Geometry Approximation with Normal Distributions
Masashi Yokozuka, Kenji Koide, Shuji Oishi, and Atsuhiko Banno
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020)
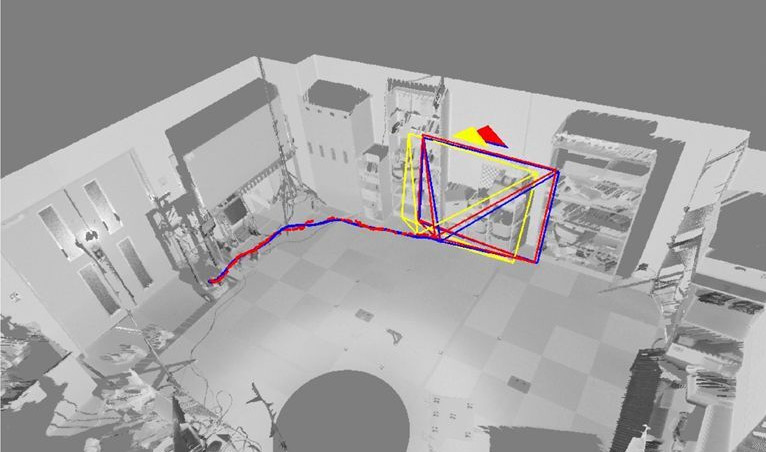
C*: Cross-modal Simultaneous Tracking And Rendering for 6-DoF Monocular Camera Localization Beyond Modalities
Shuji Oishi, Yasunori Kawamata, Masashi Yokozuka, Kenji Koide, Atsuhiko Banno, and Jun Miura
IEEE Robotics and Automation Letters (RA-L) 2020 (also presented in IROS2020)

VITAMIN-E: VIsual Tracking And MappINg with Extremely Dense Feature Points
Masashi Yokozuka, Shuji Oishi, Thompson Simon, Atsuhiko Banno
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR2019)

SeqSLAM++: View-based Robot Localization and Navigation
Shuji Oishi, Yohei Inoue, Jun Miura, Shota Tanaka
Robotics and Autonomous Systems 2019

Generating Adaptive Attending Behaviors using User State Classification and Deep Reinforcement Learning
Yoshiki Kohari, Jun Miura, Shuji Oishi
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2018)
Publications
* Please see my CV for the full list of my publications.
Journal
Single-Shot Global Localization via Graph-Theoretic Correspondence Matching
Shigemichi Matsuzaki, Kenji Koide, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno
Advanced Robotics, vol.38, Issue 3, pp. 1-14, Feb., 2024
pdf
doi
Generalized LOAM: LiDAR Odometry Estimation with Trainable Local Geometric Features
Kohei Honda, Kenji Koide, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno
IEEE Robotics and Automation Letters / ICRA2023, vol.7, Issue 4, pp.12459-12466, Oct., 2022
pdf
doi
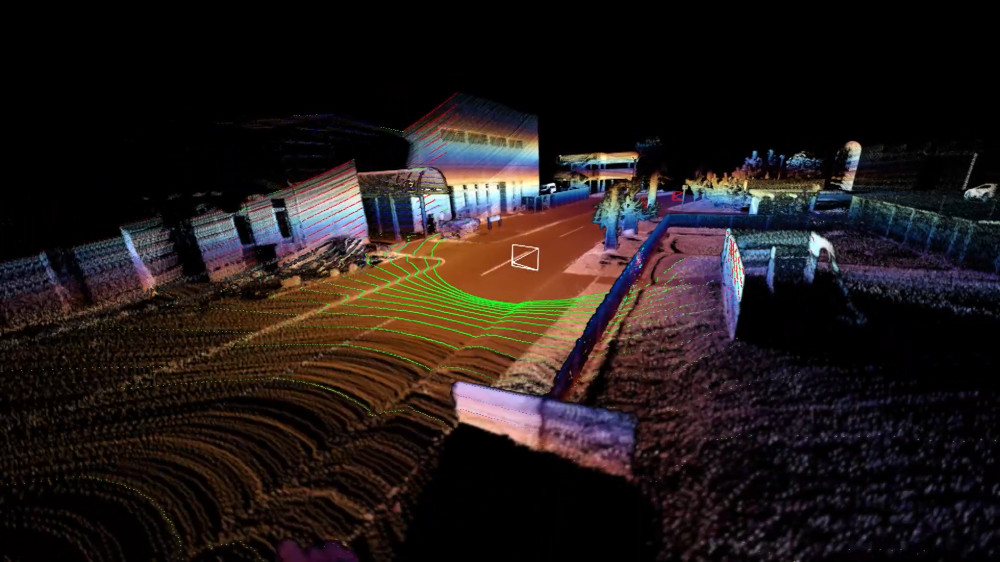
Globally Consistent 3D LiDAR Mapping with GPU-accelerated GICP Matching Cost Factors
Kenji Koide, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno
IEEE Robotics and Automation Letters, vol.6, Issue 4, pp.8591-8598, Oct., 2021
pdf
video
doi
4D Attention: Comprehensive Framework for Spatio-Temporal Gaze Mapping
Shuji Oishi, Kenji Koide, Masashi Yokozuka, Atsuhiko Banno
IEEE Robotics and Automation Letters, vol.6, Issue 4, pp.7240-7247, 2021
pdf
video
project
doi
Interactive 3D Graph SLAM for Map Correction
Kenji Koide, Jun Miura, Masashi Yokozuka, Shuji Oishi, Atsuhiko Banno
IEEE Robotics and Automation Letters, vol.6, Issue 1, pp.40-47, 2020
pdf
video
project
doi
code
C*: Cross-modal Simultaneous Tracking And Rendering for 6-DoF Monocular Camera Localization Beyond Modalities
Shuji Oishi, Yasunori Kawamata, Masashi Yokozuka, Kenji Koide, Atsuhiko Banno, Jun Miura
IEEE Robotics and Automation Letters, vol.5, Issue 4, pp.5229-5236, 2020 (also presented in IROS2020)
pdf
video
project
doi
Thermal Comfort Measurement using Thermal-Depth Images for Robotic Monitoring
Jun Miura, Mitsuhiro Demura, Kaichiro Nishi, Shuji Oishi
Pattern Recognition Letters, vol.137, pp.108-113, 2020
pdf
doi
SeqSLAM++: View-based Robot Localization and Navigation
Shuji Oishi, Yohei Inoue, Jun Miura, Shota Tanaka
Robotics and Autonomous Systems, vol.112, pp.13-21, 2019
pdf
project
doi
Manual/Automatic Colorization for Three-Dimensional Geometric Models utilizing Laser Reflectivity
Shuji Oishi and Ryo Kurazume
Advanced Robotics, Volume 28, Issue.24, pp.1617-1635, 2014
pdf
project
doi
Range Image Smoothing and Completion utilizing Laser Intensity
Shuji Oishi, Ryo Kurazume, Yumi Iwashita, and Tsutomu Hasegawa
Advanced Robotics, Volume 27, Issue 12, pp.947-958, 2013
pdf
project
doi
Conference
MegaParticles: Range-based 6-DoF Monte Carlo Localization with GPU-Accelerated Stein Particle Filter
Kenji Koide, Shuji Oishi, Masashi Yokozuka, and Atsuhiko Banno
Proc. IEEE International Conference on Robotics and Automation (ICRA2024), Yokohama, Japan, May, 2024
Tightly Coupled Range Inertial Localization on a 3D Prior Map Based on Sliding Window Factor Graph Optimization
Kenji Koide, Shuji Oishi, Masashi Yokozuka, and Atsuhiko Banno
Proc. IEEE International Conference on Robotics and Automation (ICRA2024), Yokohama, Japan, May, 2024
pdf
3D-BBS: Global Localization for 3D Point Cloud Scan Matching Using Branch-And-Bound Algorithm
Koki Aoki, Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno, and Junichi Meguro
Proc. IEEE International Conference on Robotics and Automation (ICRA2024), Yokohama, Japan, May, 2024
pdf
code
Exact Point Cloud Downsampling for Fast and Accurate Global Trajectory Optimization
Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2023), Detroit, USA, Oct, 2023
pdf
L-C*: Visual-inertial Loose Coupling for Resilient and Lightweight Direct Visual Localization
Shuji Oishi, Kenji Koide, Masashi Yokozuka, Atsuhiko Banno
2023 IEEE International Conference on Robotics and Automation (ICRA2023), pp.4033-4039, London, UK, 29 May - 2 June, 2023
pdf
video1
video2
doi
General, Single-shot, Target-less, and Automatic LiDAR-Camera Extrinsic Calibration Toolbox
Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno
2023 IEEE International Conference on Robotics and Automation (ICRA2023), pp.11301-11307, London, UK, 29 May - 2 June, 2023
pdf
video
doi
code
Scalable Fiducial Tag Localization on a 3D Prior Map via Graph-Theoretic Global Tag-Map Registration
Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2022), pp. 5347-5353, Kyoto, Japan, Oct., 2022
pdf
video
doi
Globally Consistent and Tightly Coupled 3D LiDAR Inertial Mapping
Kenji Koide, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno
IEEE International Conference on Robotics and Automation (ICRA2022), pp. 5622-5628, Philadelphia, USA, May, 2022
pdf
video
doi
Adaptive Hyper-Parameter Tuning for Black-box LiDAR Odometry
Kenji Koide, Masashi Yokozuka, Shuji Oishi, Atsuhiko Banno
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2021), Prague, Czech Republic, Sep., 2021 (to appear)
pdf
video
doi
LiTAMIN2: Ultra Light LiDAR-based SLAM using Geometric Approximation applied with KL-Divergence
Masashi Yokozuka, Kenji Koide, Shuji Oishi, Atsuhiko Banno
2021 IEEE International Conference on Robotics and Automation (ICRA2021), Xi'an, China, May, 2021
pdf
video
doi
Voxelized GICP for Fast and Accurate 3D Point Cloud Registration
Kenji Koide, Masashi Yokozuka, Shuji Oishi, Atsuhiko Banno
2021 IEEE International Conference on Robotics and Automation (ICRA2021), Xi'an, China, May, 2021
pdf
doi
code
Automatic Hyper-Parameter Tuning for Black-box LiDAR Odometry
Kenji Koide, Masashi Yokozuka, Shuji Oishi, Atsuhiko Banno
2021 IEEE International Conference on Robotics and Automation (ICRA2021), Xi'an, China, May, 2021
pdf
doi
code
Sensor-independent Pedestrian Detection for Personal Mobility Vehicles in Walking Space Using Dataset Generated by Simulation
Takahiro Shimizu, Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno, Motoki Shino
25th International Conference on Pattern Recognition (ICPR2020), Milano, Italy, Jan. 10-15, 2021
pdf
video
project
doi
LiTAMIN: LiDAR based Tracking And MappINg by Stabilized ICP for Geometry Approximation with Normal Distributions
Masashi Yokozuka, Kenji Koide, Shuji Oishi, Atsuhiko Banno
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020), Las Vegas, NV, USA, October 25-29, 2020
pdf
video
project
doi
As Symmetric As Possible : Shape Completion with Non-Rigid Registration Leveraging Generalized Cylinder Decomposition
Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno
2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), pp.542-548, Toronto, Canada, October 15-17, 2019
pdf
doi
VITAMIN-E: VIsual Tracking And MappINg with Extremely Dense Feature Points
Masashi Yokozuka, Shuji Oishi, Thompson Simon, Atsuhiko Banno
2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR2019), pp.9641-9650, Long Beach, CA, June 16-20, 2019
pdf
video
project
doi
3D Semantic Mapping in Greehouses for Agricultural Robots with Robust Object Recognition using Robots' Trajectory
Shigemichi Matsuzaki, Hiroaki Masuzawa, Jun Miura, and Shuji Oishi
2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC2018), pp.357-362, Miyazaki, Japan, Oct. 2018
pdf
doi
Generating Adaptive Attending Behaviors using User State Classification and Deep Reinforcement Learning
Yoshiki Kohari, Jun Miura, and Shuji Oishi
2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2018), pp.108-113, Madrid, Spain, Oct. 2018
pdf
project
doi
CNN-based Human Body Orientation Estimation for Robotic Attendant
Yoshiki Kohari, Jun Miura, and Shuji Oishi
IAS-15 Workshop on Robot Perception of Humans (RPH2018), Baden-Baden, Germany, June 2018
pdf
project
Large-scale 3D Outdoor Mapping and On-line Localization using 3D-2D Matching
Takahiro Sakai, Kenji Koide, Jun Miura, Shuji Oishi
2017 IEEE/SICE International Symposium on System Integration (SII2017), pp.829-834, Taipei, Taiwan, Dec. 2017
pdf
doi
Development of a Mobile Robot for Harvest Support in Greenhouse Horticulture -- Person Following and Mapping
Hiroaki Masuzawa, Jun Miura, and Shuji Oishi
2017 IEEE/SICE International Symposium on System Integration (SII2017), pp.541-546, Taipei, Taiwan, Dec. 2017
pdf
doi
Use of Thermal Point Cloud for Thermal Comfort Measurement and Human Pose Estimation in Robotic Monitoring
Kaichiro Nishi, Mitsuhiro Demura, Jun Miura, Shuji Oishi
International Conference on Computer Vision Workshops (ICCVW) : Assistive Computer Vision and Robotics (ACVR 2017), pp.1416-1423, Venice, Italy, Oct. 2017
pdf
doi
Object Classification with Range and Reflectance Data from a Single Laser Scanner
Shuji Oishi, Naoaki Kondo and Ryo Kurazume
13th International Conference on Quality Control by Artificial Vision (QCAV2017), Tokyo, May 14-16, 2017
pdf
doi
LIDAR-based Body Orientation Estimation by Integrating Shape and Motion Information
Masanobu Shimizu, Kenji Koide, Igi Ardiyanto, Jun Miura, and Shuji Oishi
2016 IEEE International Conference on Robotics and Biomimetics (ROBIO2016), pp.1948-1953, Qingdao, China, Dec. 3-17, 2016
pdf
project
doi
Toward a Robotic Attendant Adaptively Bahaving according to Human State
Shuji Oishi, Yoshiki Kohari, Jun Miura
2016 IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN2016), pp.1038-1043, New York, U.S.A., Aug. 26-31, 2016
pdf
project
doi
Outdoor Robot Navigation Based on View-based Global Localization and Local Navigation
Youhei Inoue, Jun Miura, and Shuji Oishi
14th International Conference on Intelligent Autonomous Systems (IAS-14), Shanghai, China, July 3-7, 2016
doi
ND voxel localization using large-scale 3D environmental map and RGB-D camera
Shuji Oishi, Yongjin Jeong, Ryo Kurazume, Yumi Iwashita and Tsutomu Hasegawa
2013 IEEE International Conference on Robotics and Biomimetics (ROBIO2013), pp.538-545, Shenzhen, Dec. 12-14, 2013
pdf
doi
HOLE-FREE TEXTURE MAPPING BASED ON LASER REFLECTIVITY
Shuji Oishi, Ryo Kurazume, Yumi Iwashita, and Tsutomu Hasegawa
2013 IEEE International Conference on Image Processing (ICIP2013), pp.1381-1385, Melbourne, Sep. 15-18, 2013
pdf
project
doi
Object recognition by a laser scanner using multimodal information
Shuji Oishi, Naoaki Kondo, Yumi Iwashita, Ryo Kurazume
11th International Conference on Quality Control by Artificial Vision (QCAV2013), pp.186-189, Fukuoka, May 30 - June 1, 2013
Colorization of 3D Geometric Model utilizing Laser Reflectivity
Shuji Oishi, Ryo Kurazume, Yumi Iwashita, and Tsutomu Hasegawa
2013 IEEE International Conference on Robotics and Automation (ICRA2013), pp.2311-2318, Karlsruhe, May 6-10, 2013
pdf
project
doi
Denoising of Range Images using a Trilateral Filter and Belief Propagation
Shuji Oishi, Ryo Kurazume, Yumi Iwashita, and Tsutomu Hasegawa
2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2011), pp.2020-2027, San Francisco, Sep. 25-30, 2011
pdf
project
doi
Awards
- 2022.09 - 第2回ロボティクスシンポジア優秀研究・技術賞 (主)
- 2022.03 - 第27回ロボティクスシンポジア最優秀賞 (共)
- 2021.09 - 日本ロボット学会 第36回研究奨励賞 (主)
- 2020.12 - SI2020 優秀講演賞 (共)
- 2020.10 - 日本ロボット学会学術講演会 第1回優秀講演賞 (主)
- 2020.03 - 第25回ロボティクスシンポジア優秀賞 (主)
- 2019.03 - 第24回ロボティクスシンポジア最優秀賞 (共)
- 2017.05 - ロボカップジャパンオープン@Home Domestic Standard Platform 3rd place(チームリーダー) (主)
- 2016.12 - SI2016優秀講演賞 (共)
- 2016.09 - 第六回ロボティクスシンポジア研究奨励賞 (主)
- 2016.07 - Best Student Paper Award Finalist, International Conference on Intelligent Autonomous Systems (IAS-14) (共)
- 2015.03 - 平成26年度九州大学大学院システム情報科学府優秀学生表彰 (主)
- 2014.02 - IEEE福岡支部2013年学生研究奨励賞 (主)
- 2013.12 - Best Paper Finalist, 2013 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO 2013) (主)
- 2013.05 - 2013 IEEE Robotics and Automation Society Japan Chapter Young Award (ICRA2013) (主)
- 2012.05 - 日本学生支援機構 特に優れた業績による返還免除(全額) (主)
- 2012.02 - IEEE福岡支部2011年学生研究奨励賞 (主)
- 2011.12 - SICE SI部門賞 若手奨励賞 (主)
- 2011.03 - 第16回ロボティクスシンポジア優秀論文賞 (主)
- 2010.04 - 飛び級 (学部3年次終了後修士課程進学) (主)
Media
- 2023.07.27 - 「ニッポンの自動運転の未来は?」@ テレビ東京 モーニングサテライト 大浜見聞録
- 2023.06.20 - 「高精度 VPS の開発と4次元時空間視線計測への応用」@ 月間JETI 2023年7月号
- 2023.06.02 - 「パーソナルモビリティーをスマホで手軽に自動運転化」@ Forbes JAPAN
- 2023.06.01 - 「産総研、カメラ映像から端末の位置姿勢推定 電動車いすにスマホ組み合わせ自動走行」@ ニュースイッチ
- 2023.06.01 - 「自動運転への活用も提案 産総研、位置姿勢推定システム「L-C*」開発」@ LIGARE 人・まち・モビリティ
- 2023.05.31 - 「IMUで位置姿勢推定 産総研、計算コスト30分の1」@ 日刊工業新聞 2023年5月31日 朝刊 25面
- 2023.05.31 - 「スマホのカメラで自動運転!産総研が「凄い技術」発表」@ 自動運転ラボ
- 2023.05.29 - 「カメラと慣性計測装置を利用した頑健な位置姿勢推定システムを開発」@ 産総研プレス
Grants
- 2022.04 - 2025.03 ヘッドレスパーソナルモビリティの自律移動と制御 (科研費 基盤C: 代表)
- 2021.04 - 2022.03 力覚呈示によるパーソナルモビリティの運転操作支援システムの開発 (スズキ財団若手科学技術研究助成: 代表)
- 2018.04 - 2021.03 人と共生するパートナーモビリティの開発 (科研費 若手研究: 代表)
- 2017.04 - 2018.03 レーザリフレクタンスを利用したカメラ映像による自己位置同定 (内藤科学技術振興財団研究助成: 代表)
- 2016.04 - 2018.03 陰関数近似を用いた単眼カメラによる実時間での高密度な3次元復元 (人工知能研究振興財団研究助成: 代表)
- 2016.04 - 2019.03 任意運動単眼カメラを用いた幾何プリミティブ近似による3次元構造復元 (科研費 若手研究(B): 代表)
- 2013.04 - 2017.03 人のアウェアネスの推定に基づく移動ロボットの付き添い行動の生成 (科研費 基盤研究(B): 連携)
- 2012.04 - 2015.03 リフレクタンス情報に基づくレーザスキャナの高機能化 (科研費 特別研究員奨励費: 代表)