Generating Adaptive Attending Behaviors using User State Classification and Deep Reinforcement Learning
- Yoshiki Kohari
- Jun Miura
- Shuji Oishi
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2018)
Abstract
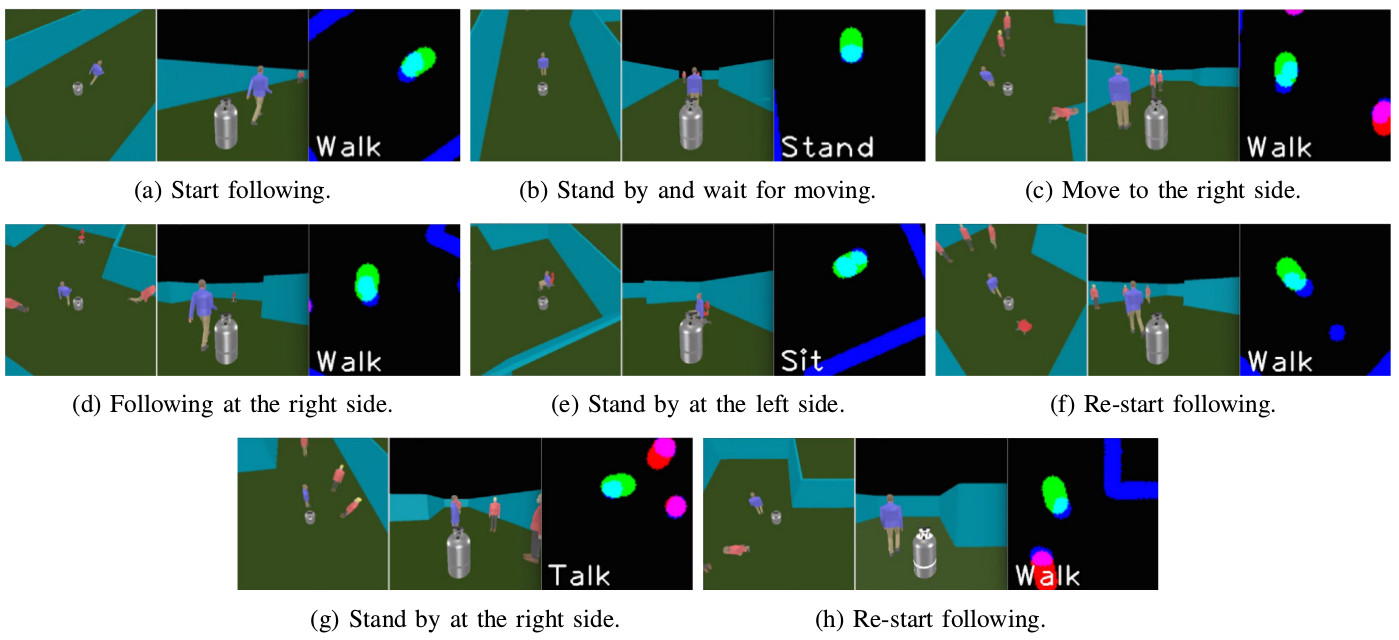
This paper describes a method of generating attending behaviors adaptively to the user state. The method classifies the user state based on user information such as the relative position and the orientation. For each classified state, the method executes the corresponding policy for behavior generation, which has been trained using a deep reinforcement learning, namely DDPG (deep deterministic policy gradient). We use as a state space of DDPG a distance-transformed local map with person information, and define reward functions suitable for respective user states. We conducted attending experiments both in a simulated and a real environment to show the effectiveness of the proposed method.
Paper
Generating Adaptive Attending Behaviors using User State Classification and Deep Reinforcement Learning
Yoshiki Kohari, Jun Miura, and Shuji Oishi
2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2018), pp.108-113, Madrid, Spain, Oct. 2018
pdf
bibtex
project
doi
CNN-based Human Body Orientation Estimation for Robotic Attendant
Yoshiki Kohari, Jun Miura, and Shuji Oishi
IAS-15 Workshop on Robot Perception of Humans (RPH2018), Baden-Baden, Germany, June 2018
pdf
bibtex
project
LIDAR-based Body Orientation Estimation by Integrating Shape and Motion Information
Masanobu Shimizu, Kenji Koide, Igi Ardiyanto, Jun Miura, and Shuji Oishi
2016 IEEE International Conference on Robotics and Biomimetics (ROBIO2016), pp.1948-1953, Qingdao, China, Dec. 3-17, 2016
pdf
bibtex
project
doi
Toward a Robotic Attendant Adaptively Bahaving according to Human State
Shuji Oishi, Yoshiki Kohari, Jun Miura
2016 IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN2016), pp.1038-1043, New York, U.S.A., Aug. 26-31, 2016
pdf
bibtex
project
doi