
 産業技術総合研究所
産業技術総合研究所訓練環境のXML
WR-AOTS™ Ver. 2.10 の訓練環境データは、XML形式です。従いまして、WR-AOTS™ Ver. 2.10 の編集ウィンドウを使用する以外にも、XMLエディタ、または普通のテキストエディタを用いてXMLのソースコードを直接編集することにより、訓練環境の編集が可能です。
訓練環境データのXMLのDTDファイル、及びXML Schemaファイルは以下のURLにあります。ダウンロードして御覧下さい。
- http://staff.aist.go.jp/yoshikazu-seki/AOTS/aots.dtd
- http://staff.aist.go.jp/yoshikazu-seki/AOTS/aots.xsd
XMLについての補足
WR-AOTS™ Ver. 2.10 は、上記DTD及びXML Schemaで定めたXMLの要素の全てを使用するわけではありません。
WR-AOTS™ Ver. 2.10 は、原文ウィンドウでXMLのソースコードを表示することはできますが、直接編集することはできません。
WR-AOTS™ Ver. 2.10 の編集ウィンドウでは、訓練環境名を編集できません(訓練環境データ保存時に、拡張子を除くファイル名が自動的に訓練環境名となります)が、XMLのソースコードを直接編集すると、訓練環境名を自由に付けられます。
XMLのソースコードの中では、距離の単位はmではなく、cmとなっています。これは、聴覚空間認知訓練システム Ver. 1.0で使用した3次元音響処理装置における距離の指定がcm単位であったことに由来します。
XMLのソースコードの中では、カードとフレーズは、1つにまとめてphrase要素として記録されています。
Ver. 2.09以前では、日本語の訓練環境データファイルは文字コードがShift-JISでしたが、Ver. 2.10以降ではUTF-8に統一されます。Ver. 2.09以前のバージョンで御自分で作成した日本語のShift-JISの訓練環境データファイルは、Ver. 2.10以降のバーションで一旦読み込み、再度保存するとUTF-8で保存できます。
広範囲測位
WR-AOTS™ Ver. 2.10 では、訓練生の頭部の位置及び方向を計測するために、広範囲測位技術を使用しています。
広範囲測位技術
は、計測範囲に制限がない測位技術の総称で、GPS、加速度センサ、ジャイロセンサ、地磁気センサなどが含まれます。WR-AOTS™ Ver. 2.10 では、以下の広範囲測位センサを使用しています。
- GPS : USB接続式NMEA規格対応GPS(※ただしGPSの使用は現在推奨していません)
- 加速度センサ : Wii®リモコンプラス™内蔵 3軸加速度センサ
- ジャイロセンサ : Wii®リモコンプラス™内蔵 3軸ジャイロセンサ
- 地磁気センサ : なし
一般に広範囲測位センサの計測値には大きな誤差が含まれます。WR-AOTS™ Ver. 2.10 では、誤差の影響を軽減するために、以下の処理を行っています。
-
計測値のノイズ及びバイアスの除去
センサによる計測値には、ノイズ(速い振動の計測誤差)及びバイアス(長時間に渡って持続する一定の計測誤差)が含まれています。この両者を数学的処理を用いて除去します。
-
安定操作モード
この処理は、
安定操作
チェックボックスをチェックしている場合のみ行われます。
GPS、及びWii®リモコンプラス™の計測結果のうち、安定している計測値のみを使用して移動します。具体的には、以下の通りです。
- GPSの計測値は全て無視します。
- Wii®リモコンプラス™の加速度センサの計測値は、歩行時の頭の上下動を検出するために上下方向の加速度のみ有効とし、前後左右方向は無視します。また上下方向の計測値も、前進移動の開始と停止の切替えにのみ使用します。
- Wii®リモコンプラス™のジャイロセンサの計測値は、水平回転(ヨー)のみを有効とし、垂直回転(ピッチ及びロール)は無視します。
-
慣性航法(INS)
GPSの測位値を使用できない場合、加速度センサによる計測値だけを使用して位置を推定します。またGPSの測位値を使用できる場合、加速度センサの計測値とGPSの測位値の両方を用いて位置を推定します。この処理が行われている時は、慣性航法インジケータが、INS有効の点灯表示(赤)になります。
-
GPS計測値の滑り(ドリフト)の防止
GPSによる測位値には、数m〜数十mの誤差が含まれています。GPSによる測位は1秒毎に行っていますが、ヒトの歩行速度で1秒間では不可能な移動距離(例えば20 m以上)をGPSが出力した場合、それはドリフトと判断し、その測位値は無視します。この場合、GPSインジケータは、たとえ受信可能衛星数が4機以上あっても、GPS無効の消灯表示(黒)になります。
公共の音のルール
WR-AOTS™ Ver. 2.10 には、日本の公共空間における音の使い方のルールに沿ったサンプル訓練環境データが入っています。ご活用下さい。
-
音響信号機
次の訓練環境データは、警察庁が定めた
視覚障害者用付加装置に関する設置・運用指針
に基づいた異種鳴交式音響信号機の例です。- 音響信号機異種鳴交式(カッコー).xml
- 音響信号機異種鳴交式(ピヨ).xml
- 音響信号機異種鳴交式(歩車分離).xml
-
音案内
次の訓練環境データは、国土交通省が定めた
公共交通機関の移動等円滑化整備ガイドライン
、およびJIS T0902 高齢者・障害者配慮設計指針-公共空間に設置する移動支援用音案内
に基づいた音案内(チャイム音)の例です。- 地下鉄入口.xml
-
静音車の車両接近通報装置
次の訓練環境データは、国土交通省が定めた
ハイブリッド車等の静音性に関する対策のガイドライン
に基づいた車両接近通報装置の音の例です。- 静音車毎時10km.xml
- 静音車毎時20km.xml
車両の音
WR-AOTS™ Ver. 2.10 は、自動車の走行音を手がかりとした訓練のために、音源にさまざまな動作をさせることができます。ご活用下さい。
-
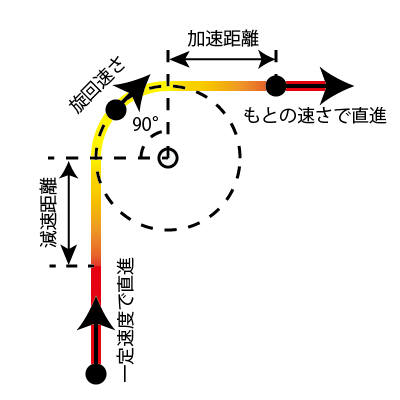
旋回
WR-AOTS™ Ver. 2.10では、自動車の動きを模擬するように音源が旋回します。音源の初期位置、速度、及び旋回中心から、旋回前の減速距離、旋回後の加速距離、および旋回速さを自動的に計算します。なお旋回角度は90°に固定されています。
-
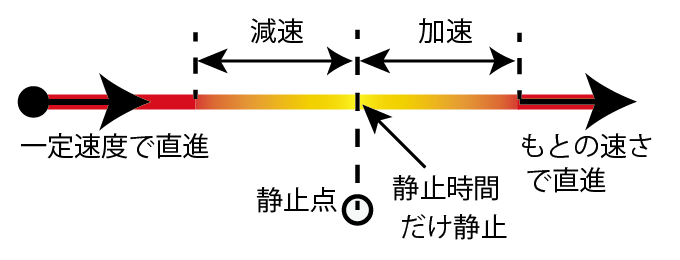
停止発進
WR-AOTS™ Ver. 2.10では、自動車の動きを模擬するように音源が減速停止し、一定時間静止して、その後発進加速し、最後はもとの速度で直進します。
-
エンジン音
WR-AOTS™ Ver. 2.10では、自動車の速度に合わせてエンジン音の音質(回転数)と音量が変化します。
WR-AOTS-210
フォルダ
WR-AOTS-210
フォルダの中の6つのアイテムの簡単な説明です。
-
WR-AOTS.exe
実行ファイルです。
-
vadmgr.dll
3次元音響処理に関連したアイテムです。詳細は非公開です。
-
Soundsフォルダ
音源データを格納するフォルダです。内容は音源データの管理参照。
-
Lessonsフォルダ
訓練環境データを格納するフォルダです。内容は訓練環境の設計参照。
-
Languageフォルダ
言語データを格納するフォルダです。ウィンドウに表示される文字列の一覧が各言語ごとにXML形式で保存されています(DTD及びXML Schemaは以下を参照)
- http://staff.aist.go.jp/yoshikazu-seki/AOTS/aotsmultilingual.dtd
- http://staff.aist.go.jp/yoshikazu-seki/AOTS/aotsmultilingual.xsd
-
HRTFフォルダ
3次元音響処理に関連したアイテムです。詳細は非公開です。
WR-AOTS-210フォルダここで終わり