
Kenji Koide
Ph.D. in Engineering
Senior Researcher
Digital Architecture Research Center (DigiARC)
National Institute of Advanced Industrial Science and Technology
(AIST)
- Tsukuba Central 2, 1-1-1 Umezono, Tsukuba, Ibaraki, 305-8568, JAPAN
- k.koide [at] aist.go.jp
- Github
- Speaker Deck
- Google Scholar

Projects
Project pages are provided only in Japanese.
Point-cloud-based Localization and Mapping
- Globally Consistent and Tightly Coupled 3D LiDAR Inertial Mapping, ICRA2022
- Globally Consistent 3D LiDAR Mapping with GPU-accelerated GICP Matching Cost Factors, IEEE RA-L, 2021
- Interactive 3D Graph SLAM for Map Correction, IEEE RA-L, 2021
- Exact Point Cloud Downsampling for Fast and Accurate Global Trajectory Optimization, IROS2023
- Generalized LOAM: LiDAR Odometry Estimation with Trainable Local Geometric Features, IEEE RA-L, 2022
- Voxelized GICP for Fast and Accurate 3D Point Cloud Registration, ICRA2021
LiDAR / Camera / IMU Calibration
- General, Single-shot, Target-less, and Automatic LiDAR-Camera Extrinsic Calibration Toolbox, ICRA2023
- General Hand-eye Calibration Based on Reprojection Error Minimization, IEEE RA-L/ICRA2019, 2019
- Single-shot Camera Intrinsic Calibration Toolbox
- General Robot-Camera Synchronization based on Reprojection Error Minimization, ARS2019
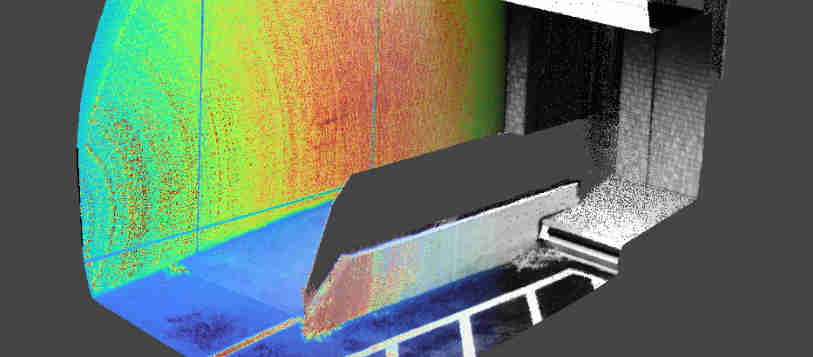
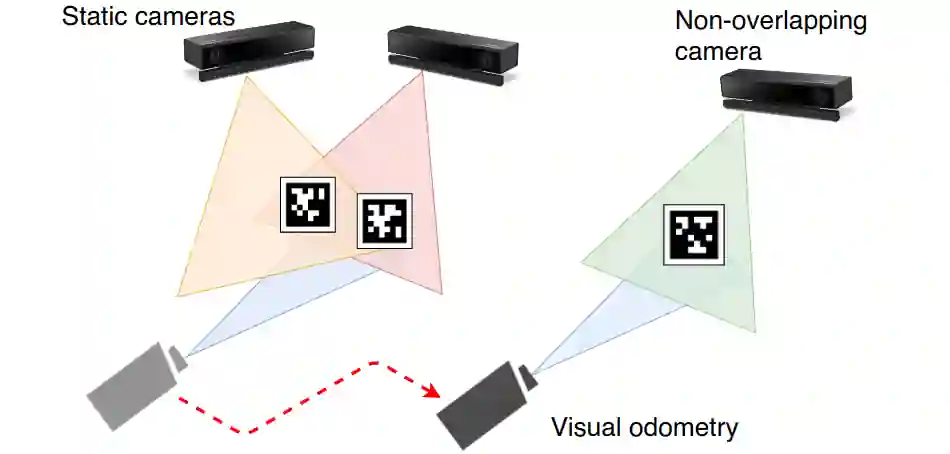
- Non-overlapping RGB-D Camera Network Calibration with Monocular Visual Odometry, IROS2020

Hyper-Parameter Tuning for Black-box Odometry Algorithms
- Adaptive Hyper-Parameter Tuning for Black-box LiDAR Odometry, IROS2021
- Automatic Hyper-Parameter Tuning for Black-box LiDAR Odometry, ICRA2021

Person Identification for Person Following Robots
- Monocular Person Tracking and Identification with Online Deep Feature Selection for Person Following Robots, RAS, 2020
- Identification of a Specific Person using Color, Height, and Gait Features for a Person Following Robot, RAS, 2016
- Collision Risk Assessment via Awareness Estimation Toward Robotic Attendant, IROS2020
- Person Identification Based on the Matching of Foot Strike Timings Obtained by LRFs and Smartphone, IROS2016
RGB-D Camera Network
- Non-overlapping RGB-D Camera Network Calibration with Monocular Visual Odometry, IROS2020
- People Tracking and Re-Identification by Face Recognition for RGB-D Camera Networks, ECMR2017

Misc
- Scalable Fiducial Tag Localization on a 3D Prior Map via Graph-Theoretic Global Tag-Map Registration, IROS2022
- Splatoon AR, Digital Twin Flight
- Iridescence

Student Projects
- Nakao et al., Range-based 6-DoF Monte Carlo SLAM with Gradient-guided Particle Filter on GPU, ICRA2025
- Okawara et al., Tightly-Coupled LiDAR-IMU-Wheel Odometry with an Online Neural Kinematic Model Learning via Factor Graph Optimization, Robotics and Autonomous Systems, 2025
- Aoki et al., 3D-BBS: Global Localization for 3D Point Cloud Scan Matching Using Branch-And-Bound Algorithm, ICRA2024
- Matsuzaki et al., Single-Shot Global Localization via Graph-Theoretic Correspondence Matching, Advanced Robotics, 2023
- Honda et al., Generalized LOAM: LiDAR Odometry Estimation with Trainable Local Geometric Features, IEEE RA-L, 2022
- Shimizu et al., Sensor-independent Pedestrian Detection for Personal Mobility Vehicles in Walking Space Using Dataset Generated by Simulation, ICPR2020