Visual Odometry を利用した重なりのないカメラ間のキャリブレーション
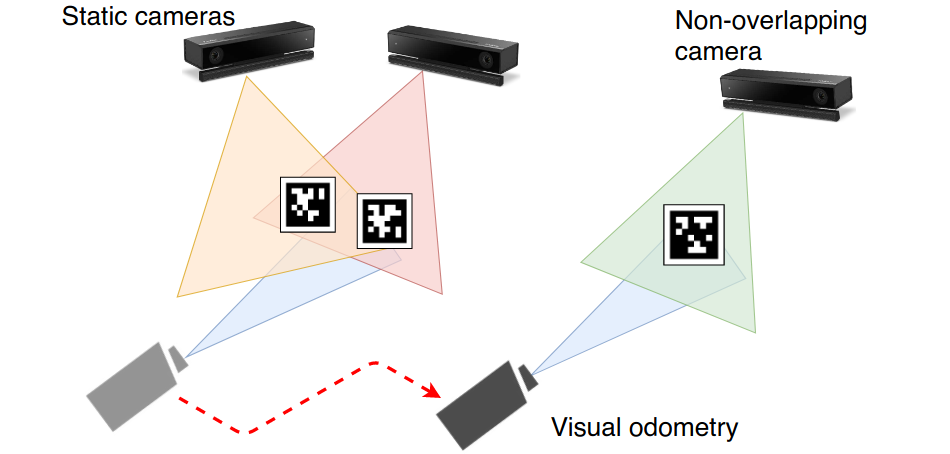
カメラネットワークの運用にあたっては,事前に各カメラ間の相対姿勢を知る必要がある. 従来はキャリブレーションターゲットをカメラ間の共通視野に置く手法が用いられているが,カメラ間の視野の重なりが小さい場合,あるいは重なりが全く無い場合にはキャリブレーションができなくなる. ここでは, Visual odometry によって手持ちカメラの移動量を推定することで,共通視野の無いカメラ間を橋渡ししてキャリブレーションを行う手法を開発した.
関連論文
Non-overlapping RGB-D Camera Network Calibration with Monocular Visual Odometry, IROS2020