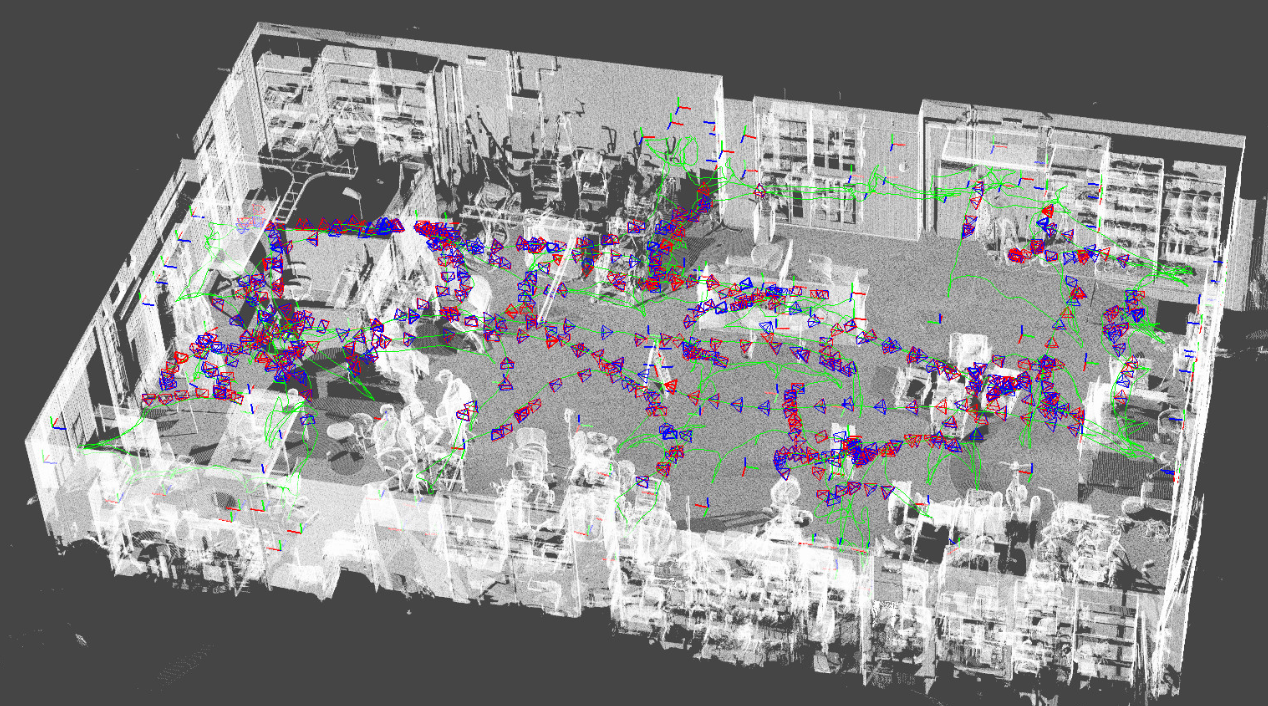
三次元地図上での Visual タグ姿勢推定
非常に困難な環境における安定した自己位置推定のためには時として Visual タグを利用する必要があります. ここでは,三次元地図上に配置された多数のタグ姿勢を簡便に求めるため,手持ちカメラによる Visual SLAM でタグ間の相対姿勢を求めた後,グラフ理論の最大クリーク問題としてタグ・地図間のマッチングを行いました. 実環境での実験では環境に設置された100個以上のタグ姿勢を10分程度の計測で求められることを示しました.
関連論文
Scalable Fiducial Tag Localization on a 3D Prior Map via Graph-Theoretic Global Tag-Map Registration,
IROS2022