受賞等
第31回ロボティクスシンポジア学生奨励賞 (2026年3月)
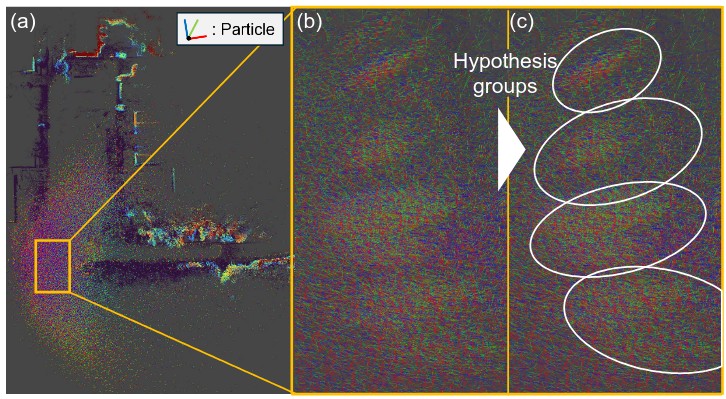
GPUを利用したReservoir Stein Particle Filterによる点群6自由度モンテカルロSLAM
中尾巧道 (筑波大M2)
第31回ロボティクスシンポジア学生奨励賞 (2026年3月)
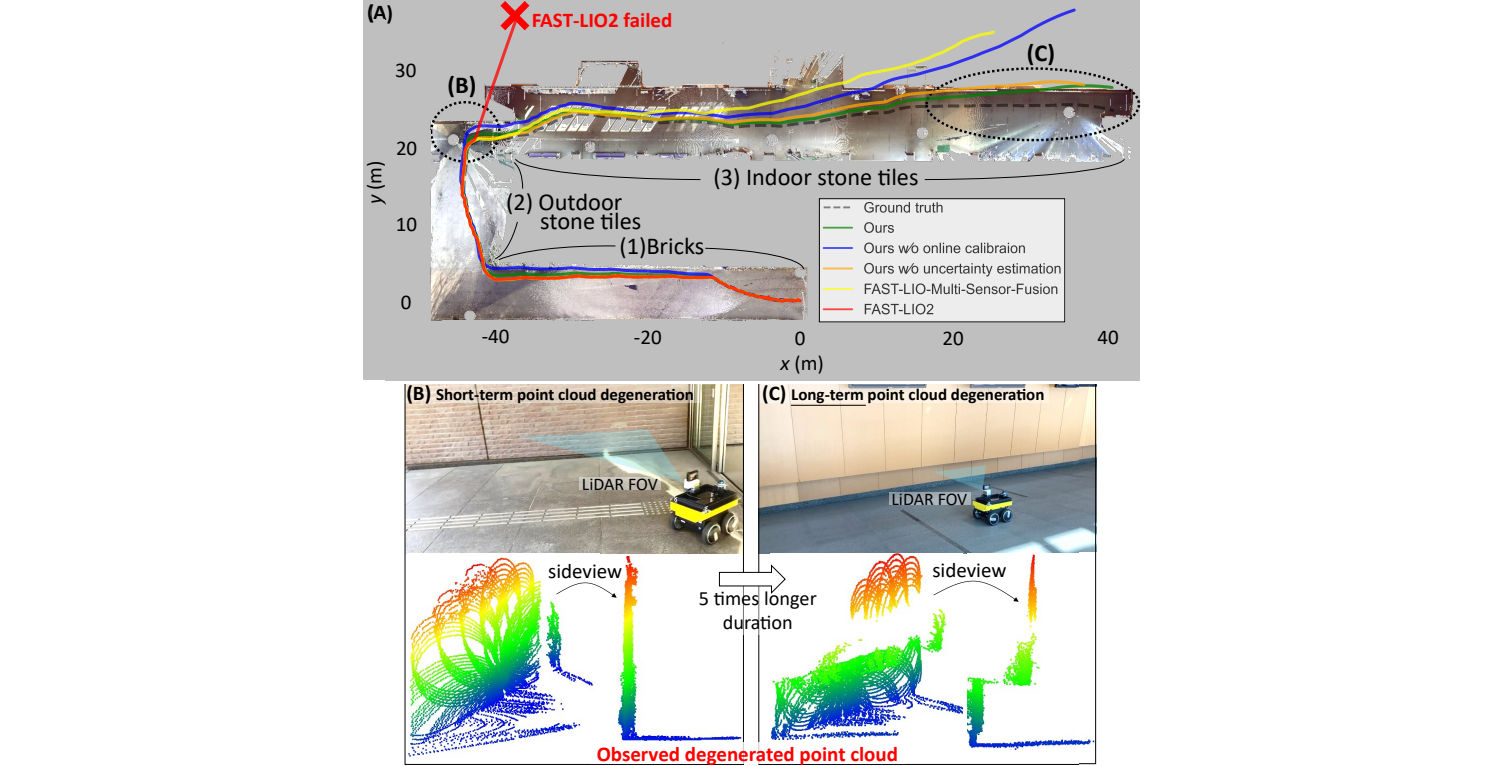
Dual Quadric表現を用いた動的物体追跡とRGB-D・IMU制約の密結合によるオドメトリ推定
島田豊藏 (豊橋技科大M2)
IEEE RAS Japan Joint Chapter Young Award @ ICRA2025 (2025年5月)
Range-based 6-DoF Monte Carlo SLAM with Gradient-guided Particle Filter on GPU
中尾巧道 (筑波大M2)
第30回ロボティクスシンポジア学生奨励賞 (2025年3月)
オンライン学習されたニューラル運動モデルとLiDAR・IMU制約の密結合によるオドメトリ推定
大河原拓 (東北大D3)
第29回ロボティクスシンポジア学生奨励賞 (2024年3月)
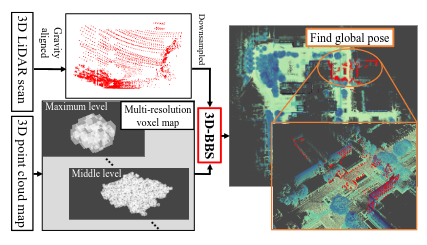
分枝限定法を利用したスキャンマッチングによる三次元大域自己位置推定
青木洸樹 (名城大M2)
第26回ロボティクスシンポジア学生奨励賞 (2021年3月)
パーソナルモビリティのためのLIDARの反射強度特性に依存しない歩行者認識手法の提案
清水崇博 (東大M2)
SI2020 優秀講演賞 (2020年12月)
周辺歩行者への影響を抑制した自律移動体の経路計画手法の提案
清水崇博 (東大M2)