特定人物識別
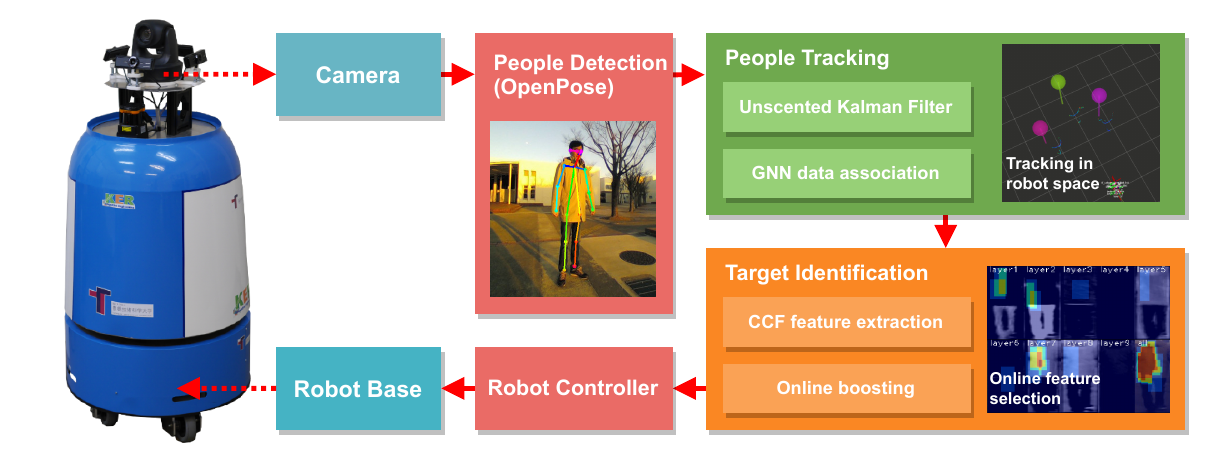
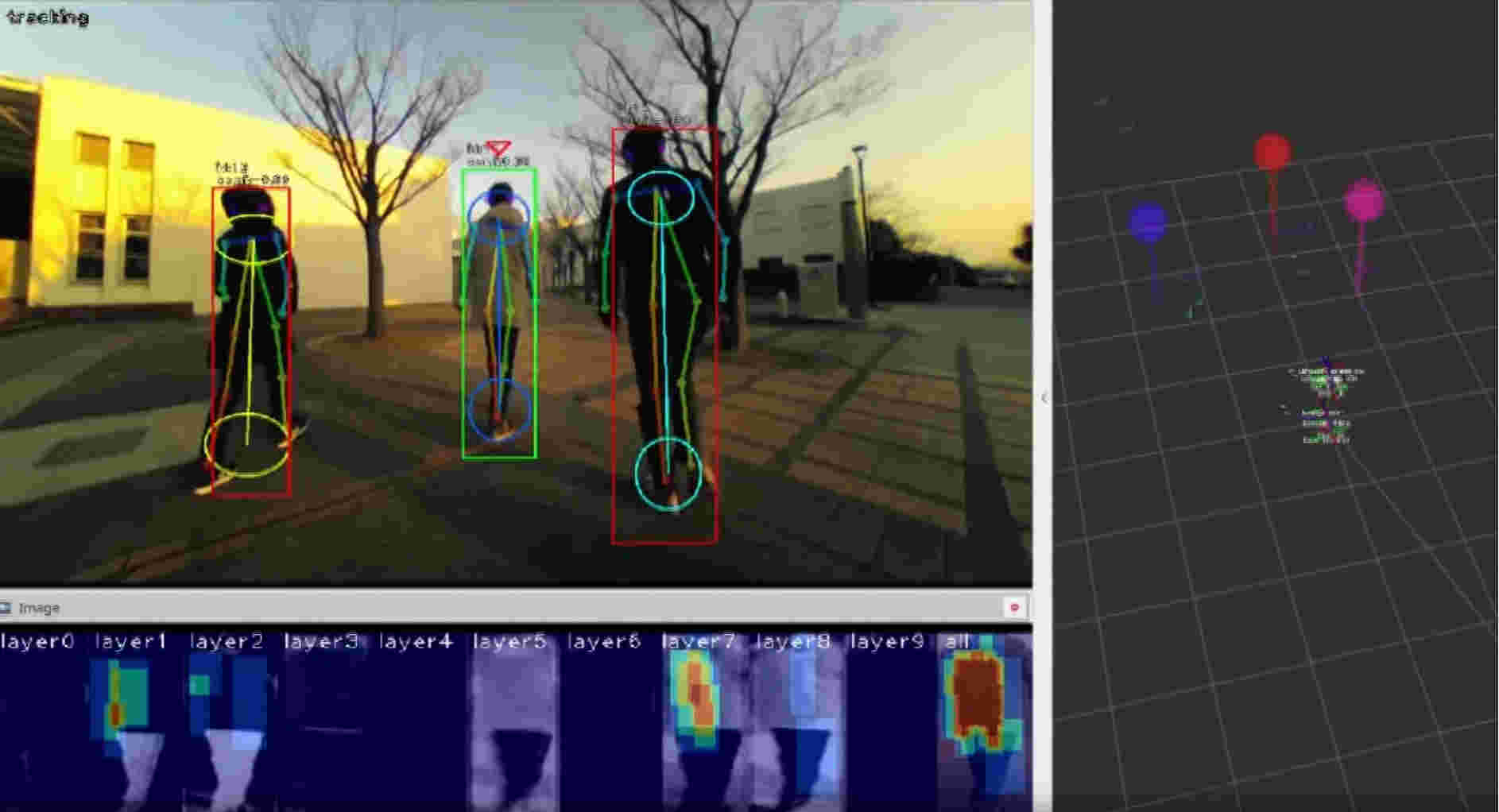
特定の人に追従するためには,まず他の人と間違うことなくその特定の人を識別することが必要となります. 照明変化や他の人による遮蔽のもとでも安定して追従対象人物を識別するため,ロボットに搭載された 2D LiDAR とカメラを組み合わせることで見え・歩容・身長などの様々な特徴をオンライン学習する機能を開発しました.
関連論文
Monocular Person Tracking and Identification with Online Deep Feature Selection for Person Following
Robots,
Robotics and Autonomous Systems, 2020

Identification of a Specific Person using Color, Height, and Gait Features for a Person Following Robot,
Robotics and Autonomous Systems, 2016
Person Identification Based on the Matching of Foot Strike Timings Obtained by LRFs and Smartphone,
IROS2016
人物識別フレームワーク