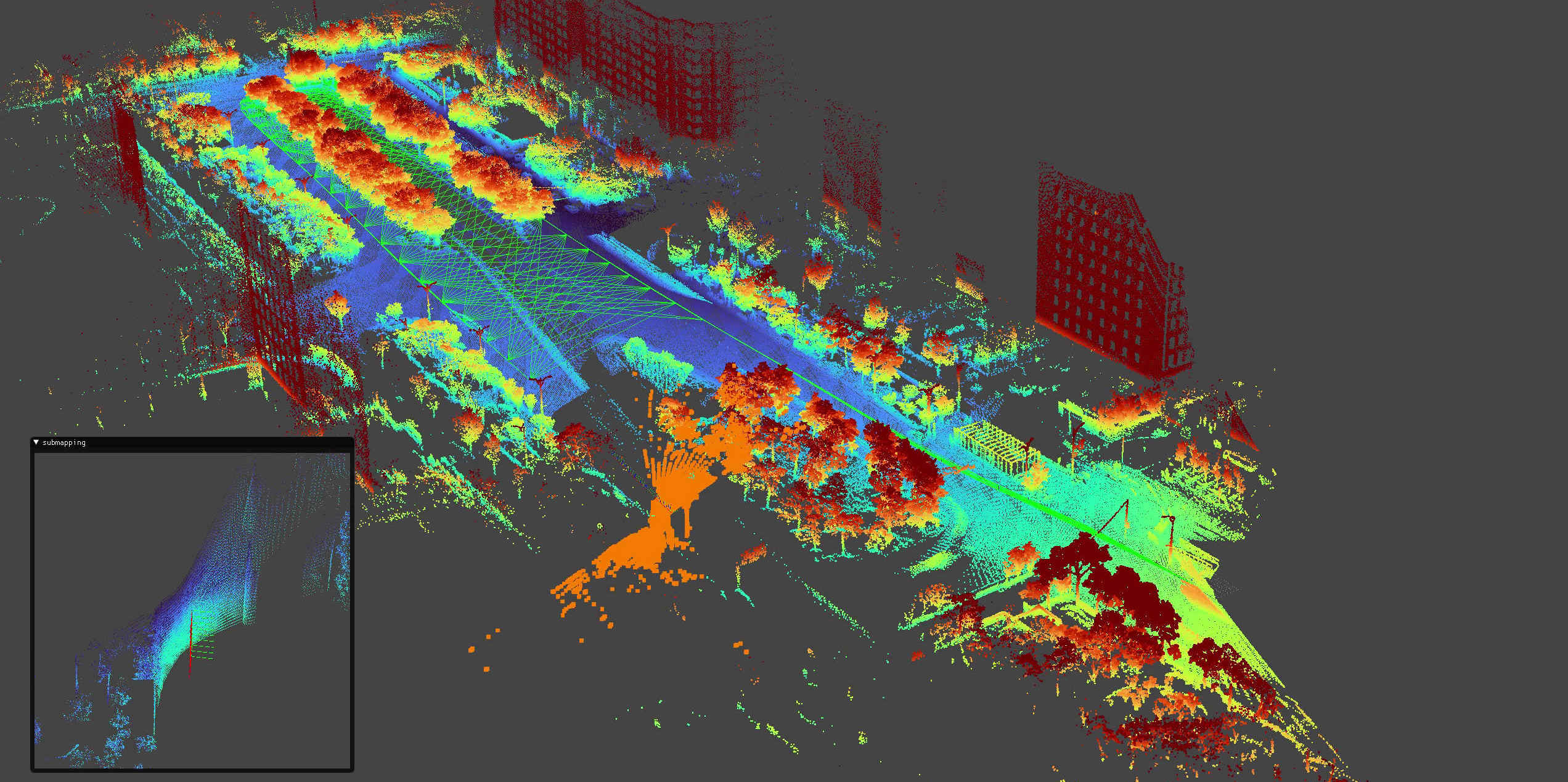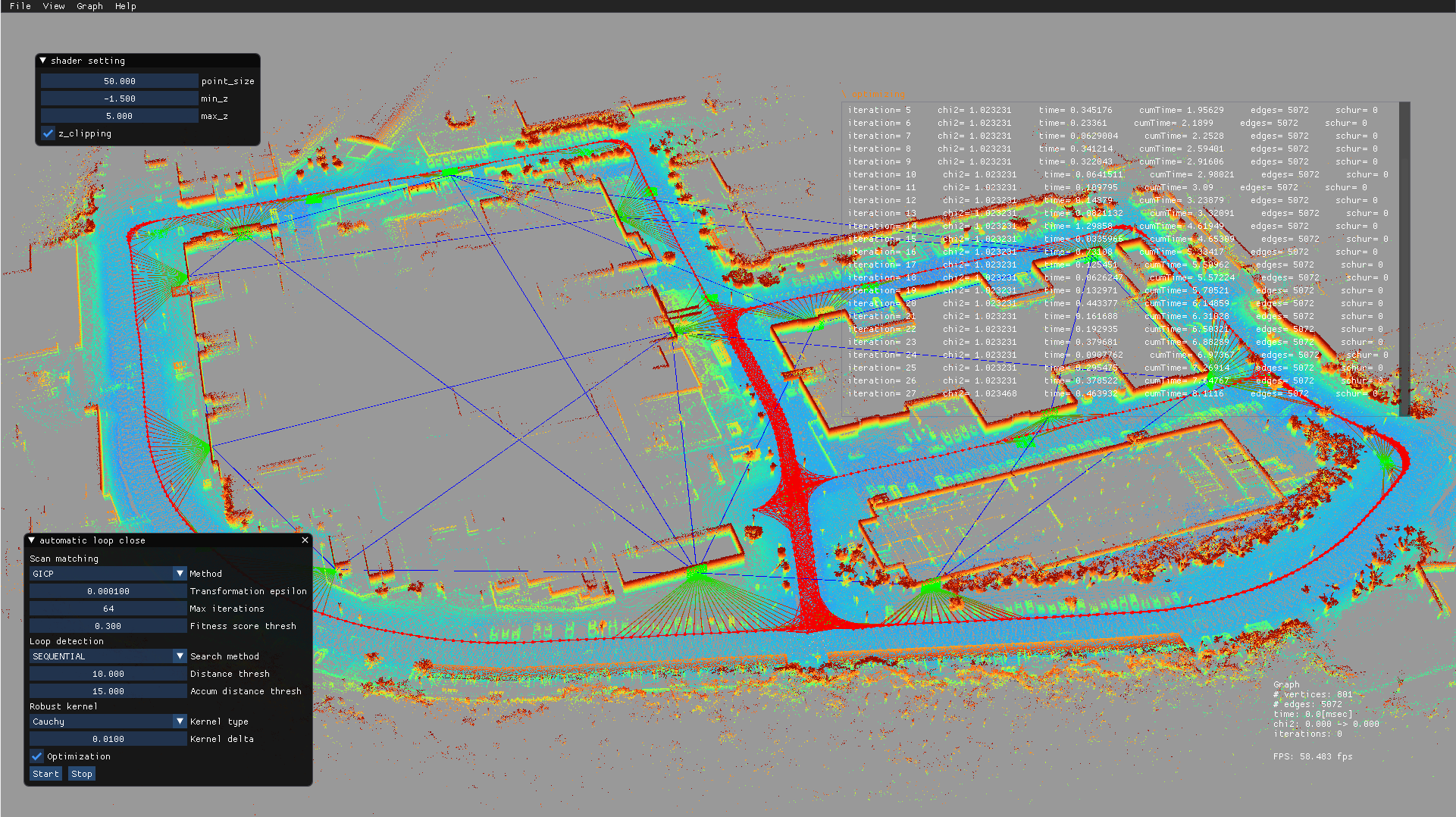
大域マッチングコスト最小化による高精度マッピング
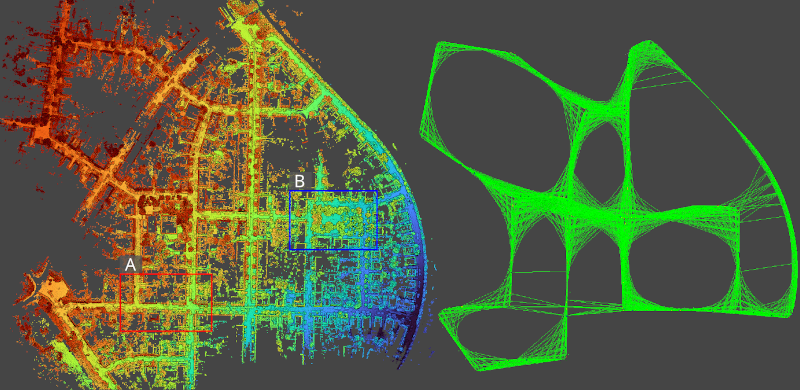
GPUを用いた超高速点群マッチング技術を背景に,地図全体で直接点群レジストレーションコストを最小化する高精度マッピング技術を開発しています. 従来技術では困難であった,重なりの小さな点群間への高精度な姿勢拘束を可能とし,超高密度ファクタグラフをリアルタイムで最適化します.
関連論文
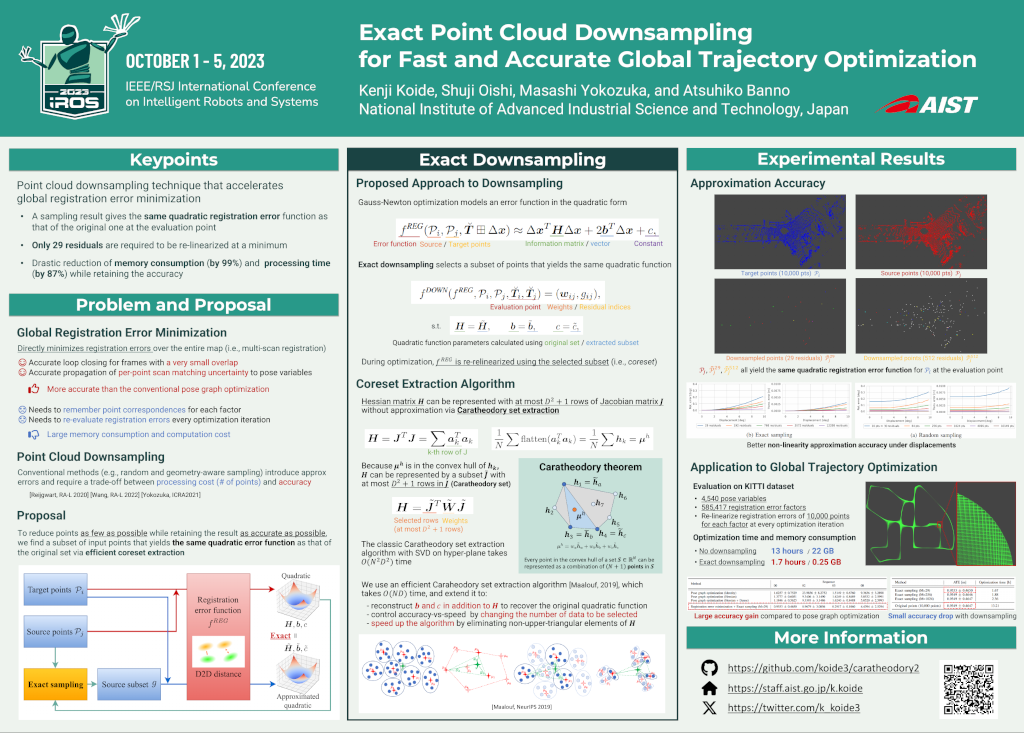
Exact Point Cloud Downsampling for Fast and Accurate Global Trajectory Optimization, IROS2023
Globally Consistent 3D LiDAR Mapping with GPU-accelerated GICP Matching Cost Factors, IEEE RA-L, 2021

Voxelized GICP for Fast and Accurate 3D Point Cloud Registration, ICRA2021
Plane-ICP / GICP / VGICP 速度比較
ポーズグラフ vs 大域マッチングコスト最小化
GPUを用いた高速大域地図最適化
Slides @ Robotics Symposia 2022
Slides @ ICRA2021
Slides @ IROS2023
Poster @ IROS2023