WR-AOTS™ Ver. 2.07J の訓練環境データは、XML形式です。従いまして、WR-AOTS™ Ver. 2.07J の編集ウィンドウを使用する以外にも、XMLエディタ、または普通のテキストエディタを用いてXMLのソースコードを直接編集することにより、訓練環境の編集が可能です。
訓練環境データのXMLのDTDファイルは以下のURLにあります。ダウンロードして御覧下さい。
XMLについての補足
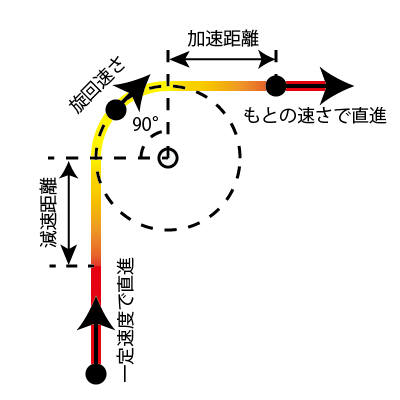
WR-AOTS™ Ver. 2.07Jでは、自動車の動きを模擬するように音源が旋回します。音源の初期位置、速度、及び旋回中心から、旋回前の減速距離、旋回後の加速距離、および旋回速さを自動的に計算します。なお旋回角度は90°に固定されています。
音源の旋回ここで終わり
WR-AOTS™ Ver. 2.07J では、訓練生の頭部の位置及び方向を計測するために、広範囲測位技術を使用しています。
広範囲測位技術
は、計測範囲に制限がない測位技術の総称で、GPS、加速度センサ、ジャイロセンサ、地磁気センサなどが含まれます。WR-AOTS™ Ver. 2.07J では、以下の広範囲測位センサを使用しています。
- GPS : USB接続式NMEA規格対応GPS
- 加速度センサ : Wii®リモコンプラス™内蔵 3軸加速度センサ
- ジャイロセンサ : Wii®リモコンプラス™内蔵 3軸ジャイロセンサ
- 地磁気センサ : なし
一般に広範囲測位センサの計測値には大きな誤差が含まれます。WR-AOTS™ Ver. 2.07J では、誤差の影響を軽減するために、以下の処理を行っています。
-
加速度計測値のノイズ及びバイアスの除去
この処理は、加速度センサを使用する場合に常時行われます。加速度センサによる計測値には、ノイズ(速い振動の計測誤差)及びバイアス(長時間に渡って持続する一定の計測誤差)が含まれています。この両者を移動平均処理などを用いて除去します。
-
この処理は、滑り防止
チェックボックスをチェックしている場合のみ行われます。
GPSによる測位値には、数m〜数十mの誤差が含まれています。GPSによる測位は1秒毎に行っていますが、ヒトの歩行速度で1秒間では不可能な移動距離(例えば20 m以上)をGPSが出力した場合、それはドリフトと判断し、その測位値は無視します。この場合、GPSインジケータは、たとえ受信可能衛星数が4機以上あっても、GPS無効の表示(黒)になります。
-
この処理は、慣性航法
チェックボックスをチェックしている場合のみ行われます。
GPSの測位値を使用できない場合(受信可能衛星数が4機未満、またはドリフト発生時)、加速度センサによる計測値だけを使用して位置を推定します。またGPSの測位値を使用できる場合、加速度センサの計測値とGPSの測位値の両方を用いて位置を推定します。この処理が行われている時は、慣性航法インジケータが、INS有効の表示(赤)になります。
-
安定操作モード
この処理は、安定操作
チェックボックスをチェックしている場合のみ行われます。
GPS、及びWii®リモコンプラス™の計測結果のうち、安定している計測値のみを使用して移動します。具体的には、以下の通りです。
- GPSの計測値は全て無視します。
- Wii®リモコンプラス™の加速度センサの計測値は、前後方向のみ有効とし、上下左右方向は無視します。また前後方向の計測値も、前進移動の開始と停止の切替えにのみ使用します。
- Wii®リモコンプラス™のジャイロセンサの計測値は、水平回転(ヨー)のみを有効とし、垂直回転(ピッチ及びロール)は無視します。
広範囲測位ここで終わり
WR-AOTS-207J
フォルダの中の5つのアイテムの簡単な説明です。
-
実行ファイルです。
-
vadmgr.dll
3次元音響処理に関連したアイテムです。詳細は非公開です。
-
Soundsフォルダ
音源データを格納するフォルダです。内容は音源データの管理参照。
-
Lessonsフォルダ
訓練環境データを格納するフォルダです。内容は訓練環境の設計参照。
-
3次元音響処理に関連したアイテムです。詳細は非公開です。