XML for training field
The training field data of WR-AOTS™ Ver. 2.08 is XML format. Thus, you can edit the training field, not only by the Edit window of WR-AOTS™ Ver. 2.08, but also by a XML editor or a general text editor.
The DTD file of XML for the training field is on the following URL. Please download and read it.
Supplementation for XML
The Source window of WR-AOTS™ Ver. 2.08 can show the source code of XML, but you can not edit it from this window directly.
In the Edit window of WR-AOTS™ Ver. 2.08, you cannot edit the training field name (the training field file name except extension will be the training field name automatically), but if you can edit the source code of XML directly, you can give its name freely.
In the source code of XML, the distances are expressed in cm, not in m, because 3-D sound processors of AOTS Ver. 1.0 used cm to express the distance.
In the source code of XML, the Card and the Phrase are combined and described as phrase element.
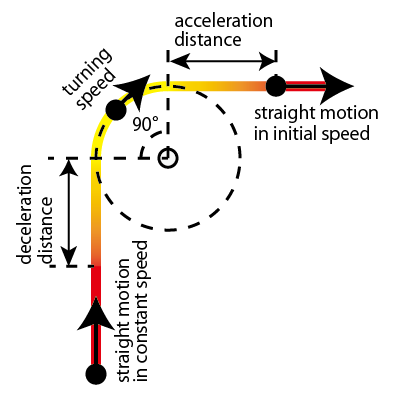
Turning of Sound
In WR-AOTS™ Ver. 2.08, the Sound can turn just like a car turns. The acceleration distance, deceleration distance, and turning speed are calculated automatically by the initial position, velocity, and turning center. The turning angle is fixed as 90 deg.
Wide-range positioning
WR-AOTS™ Ver. 2.08 uses the wide-range positioning technologies to measure the position and direction of the trainee's head.
Wide-range positioning technology
is a general term of the positioning technologies having unlimited measurement range, and including GPS, acceleration sensor, gyro sensor, terrestrial magnetism sensor, etc. WR-AOTS™ Ver. 2.08 uses the following wide-range positioning sensors.
- GPS : USB-connectable NMEA-formatted GPS
- Acceleration sensor : Built-in triaxial acceleration sensor of Wii® Remote Plus Controller™
- Gyro sensor : Built-in triaxial gyro sensor of Wii® Remote Plus Controller™
- Terrestrial magnetism sensor : non
Generally, the values measured by wide-range positioning sensors include large errors. In order to reduce influence of the errors, WR-AOTS™ Ver. 2.08 conducts the following processes.
-
Removal of noise and bias from measured values of acceleration
This process is always conducted when the acceleration sensor is used. The measured values of acceleration sensor include noise (measurement error as rapid vibrations) and bias (measurement error as long-term constant value). These are removed by moving average processing, etc.
-
Anti-drift for measured value of GPS
This process is conducted only when the Anti-drift checkbox is checked.

The positioning values of GPS include several m - dozens m error. The positioning value from GPS is received every 1 s. If the GPS sends the moving distance that is impossible to be moved with in 1 s in the human walking velocity (e.g. over 20 m), this is regarded as drift and is ignored. In this case, even if the receivable Satellites are 4 or over, GPS indicator shows unavailable (black).
-
INS
This process is conducted only when the INS checkbox is checked.

When the positioning value of GPS cannot be used (the receivable Satellites is less than 4, or in drift), only the measured value of the acceleration sensor is used to find the position. When the positioning value of GPS can be used, both the measured value of the acceleration sensor and the positioning value of GPS are used to find the position. During this process is conducted, the INS indicator shows available (red).

-
Stable operation mode
This process is conducted only when the Stable operation checkbox is checked.

Only the stable outputs of gyro and Wii® Remote Plus Controller™ are used to navigate. The details are as follows.
- The measured values of GPS are ignored.
- Only the front-back acceleration measured by Wii® Remote Plus Controller™ is used, and both up-down and right-left accelerations are ignored. Furthermore, the front-back acceleration is used only to switch start and stop of the forward movement.
- Only the horizontal rotation (yaw) measured by Wii® Remote Plus Controller™ is available, and the vertical rotations (pitch and roll) are ignored.
Rules of public sounds
WR-AOTS™ Ver. 2.08 includes samples of training field data based on Japanese rules of public sounds. We hope they are of help to you.
-
Accessible pedestrian signals (APS)
The following training field data are samples of APS based on
the guideline of installation and management of APS for the people with visual impairment (in Japanese)
by Japanese National Police Agency (NPA).- APS-DA-Chirp.xml
- APS-DA-Cuckoo.xml
- APS-DA-PVS.xml
-
Auditory guides
The following training field data are samples of the auditory guides (chimes) based on
Guidelines to Improve Barrier-Free Access for Public Transport Passenger Facilities (in Japanese)
by Japanese Ministry of Land, Infrastructure, Transport and Tourism (MLIT), andJIS T0902 Guidelines for older persons and persons with disabilities - Auditory guides in public space for mobility assist (in Japanese)
.- SubwayEntrance.xml
-
Vehicle approach notification equipment
The following training field data are samples of the sounds of the vehicle approach notification equipment based on
Guidelines of measures to silent vehicles including hybrid vehicle etc. (in Japanese)
by Japanese Ministry of Land, Infrastructure, Transport and Tourism (MLIT).- EVHV10kmh.xml
- EVHV20kmh.xml
WR-AOTS-208
folder
This section explains the 5 items in the WR-AOTS-208
folder briefly.
-
WR-AOTS.exe
The execution file.
-
vadmgr.dll
This item is related to 3-D sound processing. The detail is not opened.
-
Sounds folder
This folder is to contain the sound data. The contents are shown in Sound data management.
-
Lessons folder
This folder is to contain the training field data. The contents are shown in Taining field design.
-
HRTF folder
This item is related to 3-D sound processing. The detail is not opened.
WR-AOTS-208folder.