Tokyo University of Science
Tokyo University of Science
Tokyo University of Science
Project page
Aomi Mobility Challenge
To accelerate the adoption of autonomous mobile robots, we are conducting a public field experiment in Aomi, Tokyo. Following last year, in FY2026 a fleet of 10 autonomous robots is being deployed for real-world testing. (Project page).
24 Jun. 2026.

Read More.
Demonstration Experiment in Miraikan
We have demonstration experiment of our autonomous mobile robot "Peacock" at Miraikan. The schedule for the latter half of 2026 are Jul./16(Thu), 17(Fri), Aug./27(Thu), 28(Fri), Sep./10(Thu), 11(Fri). event page (In Japanese).
24 Jun. 2026.

Blog
Delivery Robot Demonstration Experiment
It is a preliminary demonstration of future autonomous delivery services. Four robots ran autonomously within a 1.5 km radius around the station in response to dispatch instructions from the FMS. X
31 May. 2023.
View Details
Journal publication on Journal of Robotics and Mechatronics (JRM), December 2025.
View Details
Presented in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2025), October 2025.
View Details
Presented in IEEE International Conference on Robot and Human Interactive Communication (RO-MAN2025), August 2025.
View Details
Presented in The 10th International Conference on Robot Intelligence Technology and Applications (RiTA2022), December 2022.
View Details
Presented in IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2022), July, 2022.
Data Publication
Published in IEEE Access Vol.10, February, 2022.
1
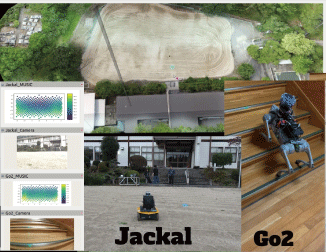
F-REI "SAAS-RD : Swarm Active Audition System with Robots and Drones"
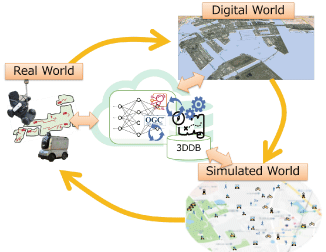
NEDO "SocialTwin : Improved Performance through Data Cycling for Autonomous Mobile Robots"
JST Moonshot Goal3 "New Life Spheres Opened up by AI Robots" (Link)
NEDO "Research and development on human-centric AI technologies embedded in the real world"
2
I'm finding a Post-doc and students to work with us!
Please feel free to contact me by e-mail.
Internship (from undergraduate students)
Research Assistant (for graduate students)
Post-doc, Technical staff
Joint research with companies
Research collaboration with universities and research institutions
|
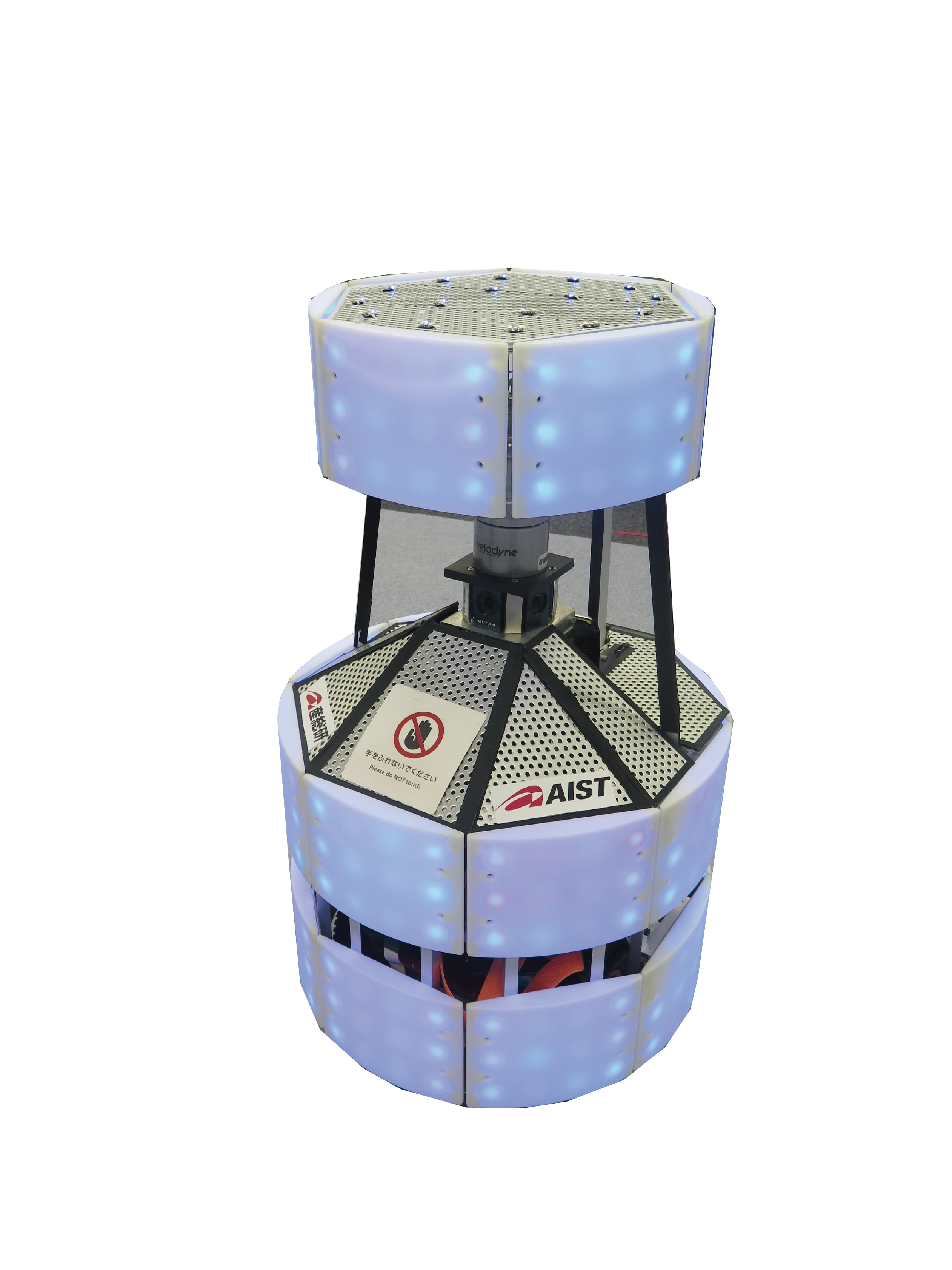
Peacock for indoor navigation- motion learning in crowds- sound identification in crowds |
 |
Whill for town-scale navigation- wheelchair type for basic experiments- box type for delivery services experiments |
 |
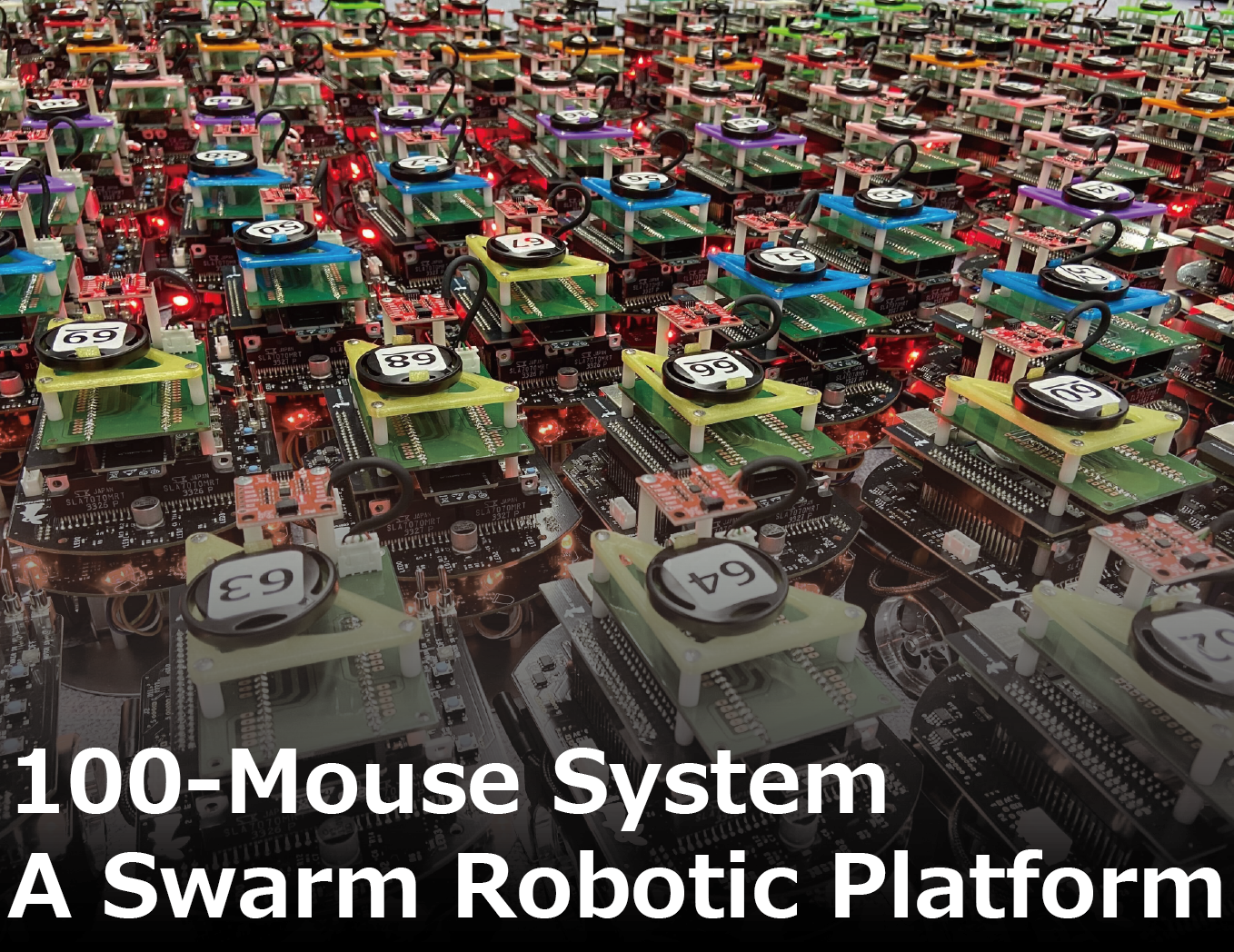
100 RaspberryPi mouse- multi‑agent path planning / motion learning- multi‑robot Coordination |
 |
fetch for mobile manipulation- objects handling in convinience store |
 |
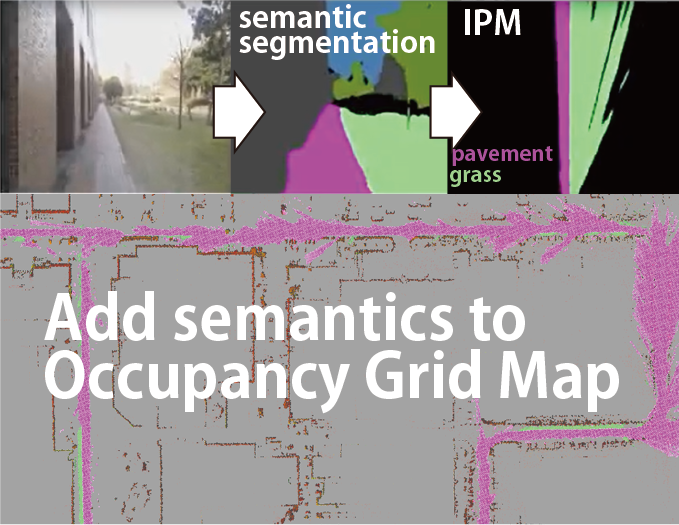
Minivan for autonomous driving- semantic mapping for autonomous driving |
© Copyrights Yoko Sasaki. All Rights Reserved