Autonomous Mobility for Everyday Life

Our goal is to realize harmonious coexistence between diverse robots, people, and urban environments.
Project Overview
Thanks to open-source software such as the ROS Navigation Stack, implementing basic autonomous navigation has become increasingly accessible.
However, autonomous mobile robots are still rarely seen in everyday urban life, and many technical and societal challenges remain before full-scale adoption can be achieved.
To address these challenges, repeated field trials are essential.
Autonomous mobility technologies are expected to be applied in various fields, including mobility assistance, delivery, guidance, and security.
This project utilizes the Aomi area as a testing ground for robots, promoting activities aimed at solving these challenges and accelerating their adoption.
In addition to technical issues, we are addressing safety, social acceptance, legal regulations, and the creation of new business opportunities from a multifaceted perspective to advance real-world implementation.
Key Initiatives
- Promoting public road trials and supporting service providers in the Aomi area
- Developing control technologies for urban environments using reinforcement learning
- Developing general-purpose autonomous mobility technologies using foundation models
- Designing operation management systems for mixed fleets of robots from multiple providers
Future Outlook
In FY2025, we began trials of close-range monitoring using multiple remotely operated small vehicles. Looking ahead, we aim to implement full-scale remote monitoring and conduct public road trials of legged robots. We will continue to develop advanced autonomous mobility technologies using reinforcement learning and foundation models, aiming to establish systems that can flexibly adapt to diverse situations without extensive manual pre-programming. Ultimately, our goal is to contribute to the realization of a sustainable society where robots are an active part of everyday life.
Field Trials and Activities
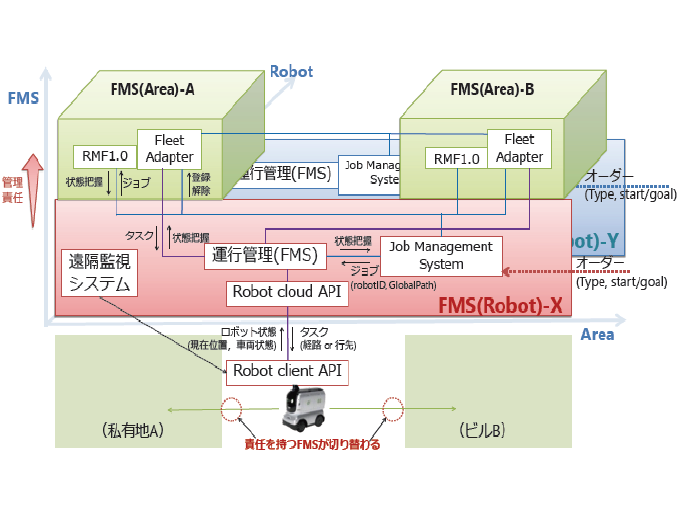
Robomech2026 presentation: Fleet Management System for Multi-Operator Environments
As part of the NEDO AI Safety Project, we proposed an operation management system for environments where robots from multiple operators coexist. By separating robot and area management and switching control authority dynamically, the system enables wide-area navigation across public and private spaces. A prototype was implemented and validated through real-robot experiments. The source code is released across three repositories and will be continuously expanded.
October 2025 – March 2026: First Public Autonomous Mobility Trials
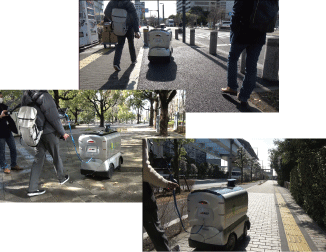
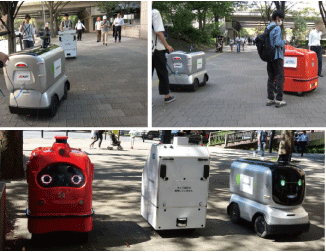
We provided opportunities for businesses and researchers interested in conducting autonomous driving trials on public roads in the Aomi area.During the six-month trial period from October to March, applications were submitted for experiments involving 16 remotely operated small vehicles and 6 quadruped robots. Unfortunately, due to the lack of legal classification for quadruped robots as vehicles, trials without physical separation measures were not approved. However, the remotely operated small vehicles received approval starting in October, and trials have been gradually launched with the approved units.
February – March 2025: Aomi Trial Kickoff
To clarify the challenges in promoting field trials and define the role of the organizing office, we launched support activities with kickoff demonstrations.Autonomous driving trials on public roads were conducted using AIST’s hacobie and Tokyo Metropolitan Industrial Technology Research Institute’s MiniTaurous, including applications to the police. On March 21, a demonstration event was held for those interested in future trials, with approximately 25 participants.
September 2024: NEDO Autonomous Navigation Trial in Nishi-Shinjuku
As part of the NEDO Leading Research Program, autonomous driving trials were conducted on public roads in the Nishi-Shinjuku area.To verify a common 3D map specification usable by multiple robot platforms, three robots—AIST’s hacobie and two from private manufacturers—were tested using commercially available 3D maps for autonomous navigation.

March 2023: Delivery Robot Trials in Kashiwanoha
As part of the PRISM project, autonomous driving trials were conducted with four delivery robots around Kashiwanoha Campus Station. To explore future delivery robot services, the trials tested autonomous navigation based on instructions from cloud services and monitored all units using a Fleet Management System (FMS).© Copyrights Yoko Sasaki. All Rights Reserved