Publications

City-Scale Grid-Topological Hybrid Maps for Autonomous Mobile Robot Navigation in Urban Area
Shun Niijima, Ryusuke Umeyama, Yoko Sasaki, Hiroshi Mizoguchi, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020), October, 2020.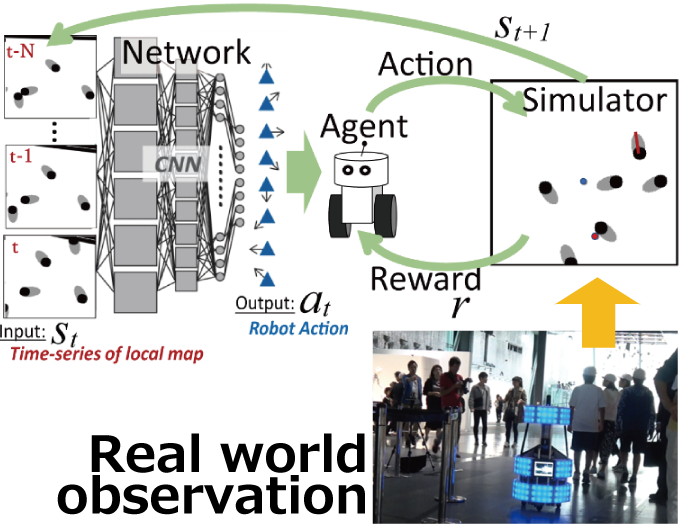
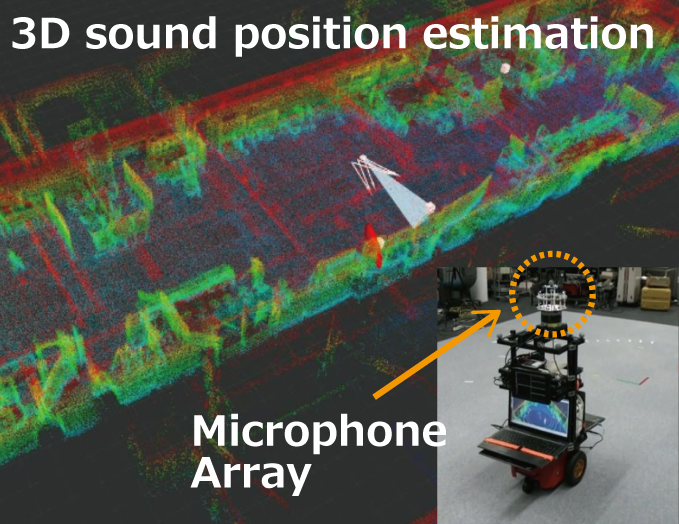
A3C Based Motion Learning for an Autonomous Mobile Robot in Crowds
Yoko Sasaki, Syusuke Matsuo, Asako Kanezaki, Hiroshi Takemura, IEEE International Conference on Systems, Man and Cybernetics (SMC2019), November, 2019.
Real-time autonomous navigation of an electric wheelchair in large-scale urban area with 3D map
Shun Niijima, Yoko Sasaki, Hiroshi Mizoguchi, Advanced Robotics, July, 2019.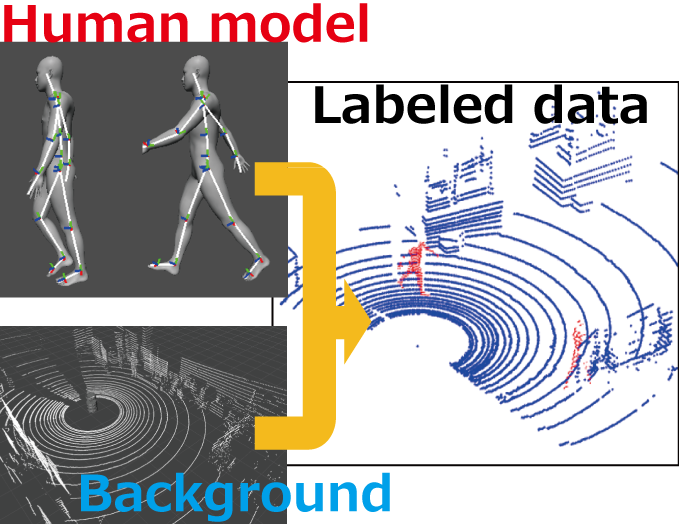
Automatic Labeled LiDAR Data Generation based on Precise Human Model
Wonjik Kim, Masayuki Tanaka, Masatoshi Okutomi, Yoko Sasaki, Hiroshi Takemura, IEEE International Conference on Robotics and Automations (ICRA2019), May, 2019.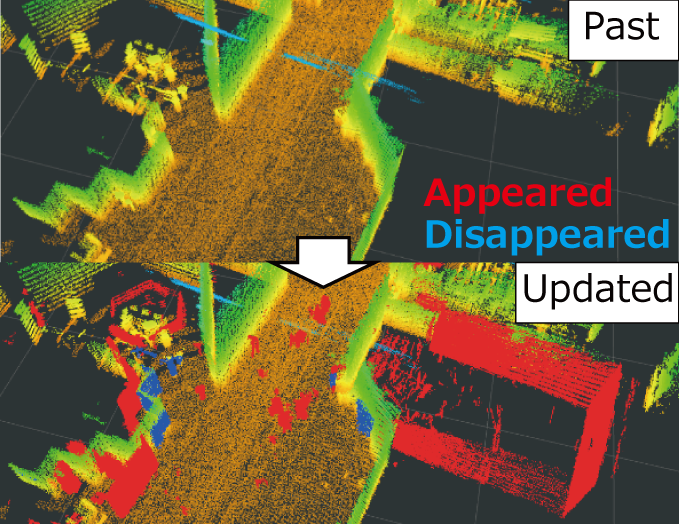
3D Map Update in Human Environment Using Change Detection from LIDAR Equipped Mobile Robot
Ikuto Jinno, Yoko Sasaki, Hiroshi Mizoguchi, IEEE/SICE International Symposium on System Integration (SII2019), January, 2019.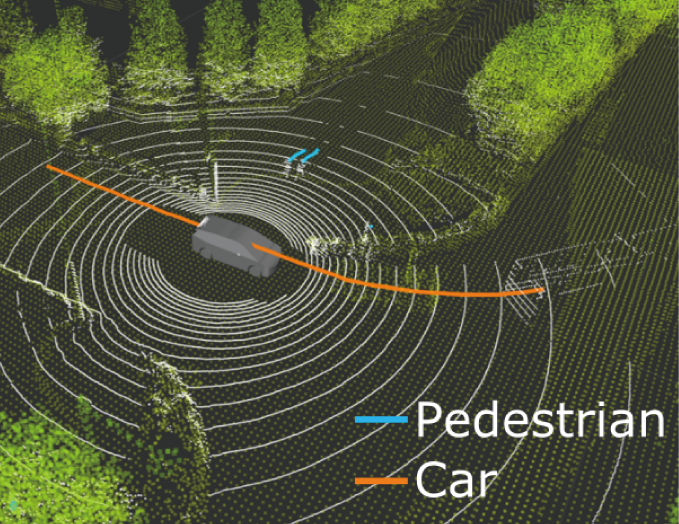
Moving objects observation from running automobile based on real-time map-size free localization
Ryusei Hasegawa, Yoko Sasaki, Hiroshi Takemura, IEEE/SICE International Symposium on System Integration (SII2019), January, 2019.