高随意操縦性乗物 LandCraft
360度全方向移動型倒立振子台車 LandCraft


平行2輪型倒立振子台車(例. 「セグウェイ(Segway)」)だが、(即時)360度全方向移動が可能(例. 「Uni-cub」)。市販品のみで構成可能。立ち乗り型。
脚のように360度全方向に好きなように動ける乗り物、とは、
- 360度全方向移動機構
- 平面の3自由度(前後・左右・回旋)を全て持つ駆動系
- 平面の3自由度の即時移動が可能(例. 真横への移動)
- 平面の3自由度の組合せ移動が可能(例. 木の葉落し)
- 随意的操縦インタフェース
- 搭乗者の重心移動による直感的操縦インタフェース
- 自由度の自然な組合せが可能な操縦インタフェース
を組合せた乗り物。
乗物以外にも、 全重心が高くても安定性を保持できるような自立移動台車、 あるいは移動ロボットのベースとしても利用可能。 (低層高所作業向け倒立振子型全方向台車 mIm)
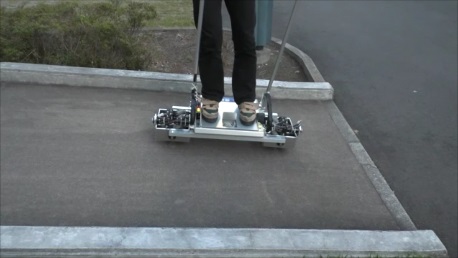
全方向移動機構 1: ペア・メカナムホイール・ユニット (PMWU)
- メカナムホイールを同軸に2つ並べた機構
- ユニットの車輪を同方向に回すと前進/後退する。
- ユニットの車輪を逆方向に回すと左右に移動する。
- 同一移動体に2つ以上のユニットを配置する。
- 地面の凹凸に倣うように、ジンバル構造とする。

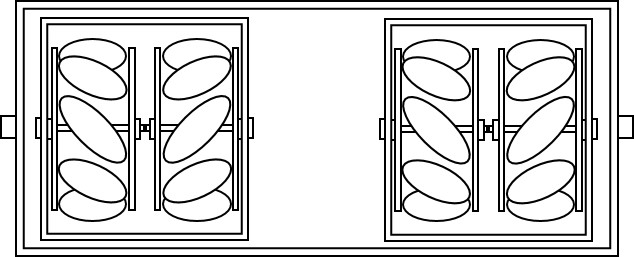
ペア・メカナムホイール・ユニット

ペア・メカナムホイール・ユニット (上面図と正面図)
参照先(「メカナムホイールを用いた全方向移動可能な平行二輪型倒立振子台車」 Robomech2015 1P2-G07)
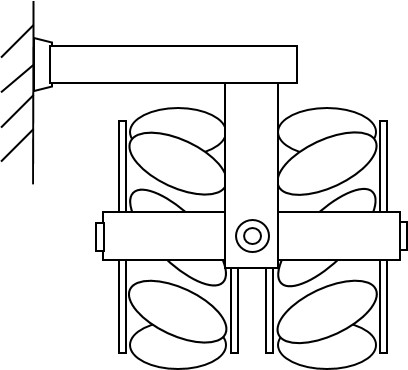
全方向移動機構 2: メカナム・オムニホイール・ユニット (MOWU)
- メカナムホイールとオムニホイールを同軸に2組並べた機構
- 2ユニットの4車輪を同方向に回すと前進/後退する。
- 2ユニットのメカナムホイールを逆方向に回すと左右に移動する。
- 同一移動体に2つのユニットを配置する。
- 地面の凹凸に倣うように、ジンバル構造とする。


メカナム・オムニホイール・ユニット


メカナム・オムニホイール・ユニット (上面図と正面図)
参照先(「メカナムホイールとオムニホイールを用いた全方向移動可能な倒立平行二輪型移動体」 Robomech2016 2A1-07a4)
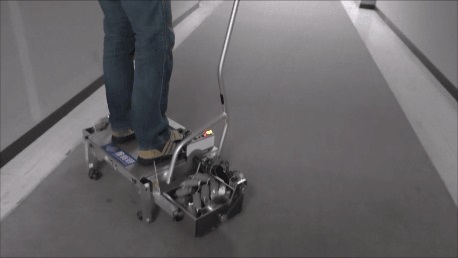
随意的操縦インタフェース(フォース・プレートと傾斜計)
- 乗車台の四隅に力センサを設置する。
- 前後: 傾き角度を前後方向への車輪の回転指令値とする。
- 左右: 左/右片足荷重での重心の変位量を車輪の差分回転指令値とする。
- 旋回: 爪先/踵荷重での捻れ的荷重量を旋回方向の回転指令値とする。
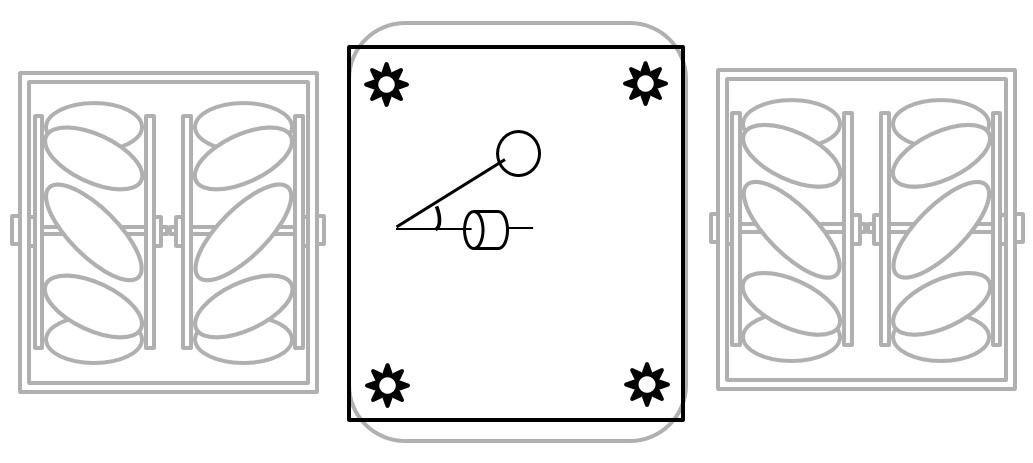
フォース・プレート(4点力センサ)と傾斜計
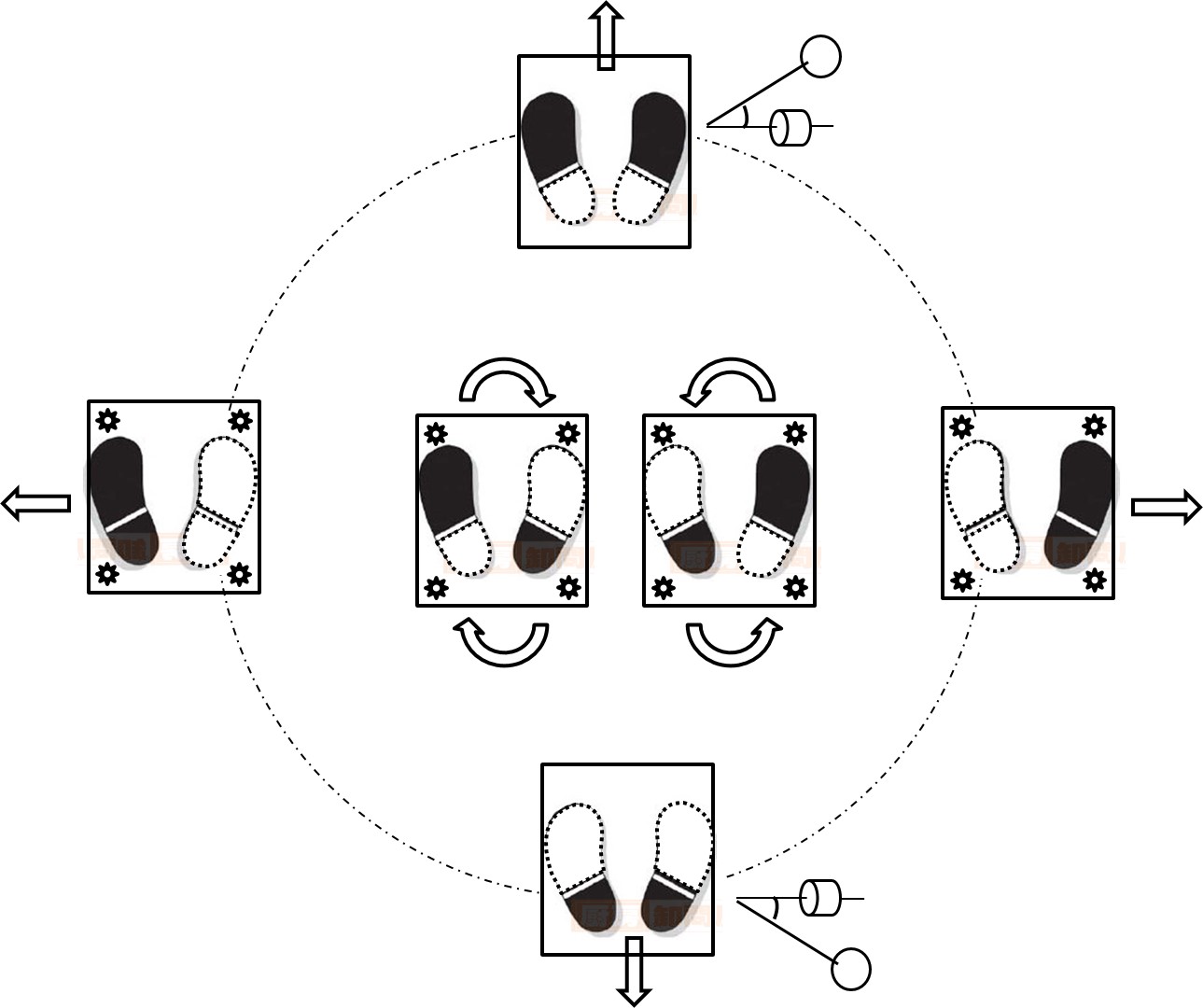
フォース・プレートへの荷重と傾斜による操縦







.jpg)
.jpg)
.jpg)
.jpg)

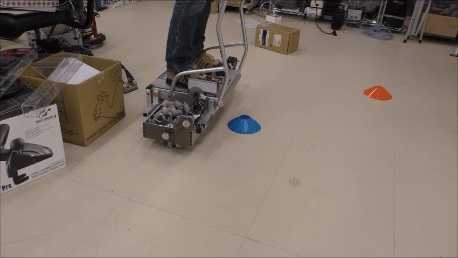
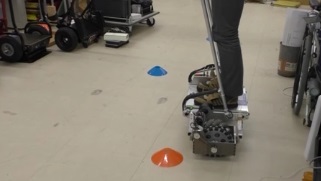
作業性の(通常型との)比較の動画
ゴミ拾いタスク(ランダムに散らばった10個のゴミを拾う)

同じ作業時間(30[s])が掛かった試行を選択・比較 [mp4:4.3MB]

それぞれの平均的作業時間(32[s]、35[s])に近い試行を選択・比較 [mp4:4.8MB]
参照先(「倒立振子型全方向移動体の作業性の評価」 RSJ2016 2A1-05)
自律動作の動画
人によるjoystickでの直接的操縦
シーケンス制御

軌道追従制御(time scaling, gain scheduling なし) [mp4:18MB]
(前後に揺れてしまっていても、お構いなしに移動動作を行ってしまう)

軌道追従制御(time scaling, gain scheduling あり) [mp4:24MB]
(前後に揺れてしまっている時は、ゆっくり・そろそろと動作を行う)
参考文献
参照先(「メカナムホイールを用いた全方向移動可能な平行二輪型倒立振子台車」 Robomech2015 1P2-G07)
参照先(「メカナムホイールとオムニホイールを用いた全方向移動可能な倒立平行二輪型移動体」 Robomech2016 2A1-07a4)
参照先(「倒立振子型全方向移動体の作業性の評価」 RSJ2016 2A1-05)
参照先(「倒立振子型乗用移動体の半自動操縦に向けた予備的研究」 SI2016 2L2-6)
参照先(「Omnidirectional Two-Parallel-Wheel-Type Inverted Pendulum Mobile Platform Using Mecanum Wheels」 AIM2017 ThAT3.6)
- Segway | セグウェイ ジャパン Segway Japan http://www.segway-japan.net/
- UNI-CUB(ユニカブ) | HONDA http://www.honda.co.jp/UNI-CUB/
- 鄭 聖熹,松川 文厚,西山 達也,井代 直也, 倒立振子型全方向移動体及び基本走行制御, 日本ロボット学会誌, Vol.29, No.8, (2011)
- 全方向移動車両 | 本田技研工業株式会社 竹中 透, 特願 2009-217791, (2009)
- 倒立振子型四輪走行装置 | 関東自動車工業株式会社 取田 秀樹, 特願 2009-269329, (2009)
- 星野 祐,パーソナルモビリティ 「オムニライド」
- Daiki Kobayashi, Naoyuki Takesue: MINAMO: Multidirectional INtuitive Aquatic MObility -Improvement of Stability and Maneuverability-, Proc. 2014 IEEE Int'l Conf. on Robotics and Biomimetics (ROBIO2014), pp.741-746, (2014).