低層高所作業向け倒立振子型全方向台車 mIm
座席リフト360度全方向移動倒立振子型台車 mIm


全方向移動可能な倒立振子台車LandCraft上に、座面高を変えられる座席を装備。3次元的に移動可能。市販品のみで構成可能。座り乗り型。
3次元的に好きなように動ける台車、とは、
- 座面昇降機構
- 成人の体重程度を可搬可能なリフト
- 360度全方向移動機構
- 平面の3自由度(前後・左右・回旋)を全て持つ駆動系
- 平面の3自由度の即時移動が可能(例. 真横への移動)
- 平面の3自由度の組合せ移動が可能(例. 木の葉落し)
を組合せた乗り物。
乗物以外にも、 全重心が高くても安定性を保持できるような自立移動台車、 あるいは移動ロボットのベースとしても利用可能。
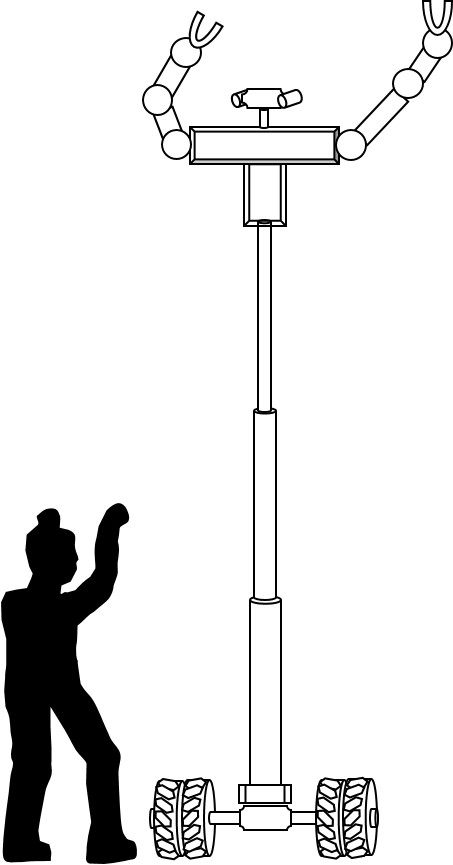
低層高所作業用ロボット(想像図)
全方向移動の動作試験の動画
無人・自動

プログラムに沿った自律走行 (座席地上高 1.5[m]) [mp4:5.0MB]
有人・自動

プログラムに沿った自律走行 (座席地上高 1.5[m]) [mp4:5.6MB]
(人は上に乗っているだけ)
有人・操縦

前後重心移動とジョイスティックとによる操縦走行 (座席地上高 1.5[m]) [mp4:5.3MB]
(右手にジョイスティックを持ち、前後への体重移動と合わせて操縦している)

参考文献
参照先(「低層高所作業向け倒立振子台車mIm開発の予備実験 (mIm: multidirectional increasable mobility)」 RSJ2017 1J1-04)
参照先(「低層高所作業向け倒立振子台車mIm開発の基礎実験 (mIm: multidirectional increasable mobility)」 Robomech2018 1A1-J08)
- Segway | セグウェイ ジャパン Segway Japan http://www.segway-japan.net/
- UNI-CUB(ユニカブ) | HONDA http://www.honda.co.jp/UNI-CUB/
- 鄭 聖熹,松川 文厚,西山 達也,井代 直也, 倒立振子型全方向移動体及び基本走行制御, 日本ロボット学会誌, Vol.29, No.8, (2011)
- 全方向移動車両 | 本田技研工業株式会社 竹中 透, 特願 2009-217791, (2009)
- 倒立振子型四輪走行装置 | 関東自動車工業株式会社 取田 秀樹, 特願 2009-269329, (2009)
- 星野 祐,パーソナルモビリティ 「オムニライド」