![]() Motion Segmentation Based on Feature
Selection Using Shape Space
Motion Segmentation Based on Feature
Selection Using Shape Space
Motion segmentation using feature correspondences can be regarded as a combinatorial problem. A motion segmentation algorithm using feature selection and subspace method is proposed to solve the combinatorial problem. Feature selection is carried out as computation of a basis of the linear space that represents the shape of objects. Features can be selected from ``each'' object ``without segmentation information'' by keeping the correspondence of basis vectors to features. Only four or less features of each object are used; the combination in segmentation is reduced by feature selection. Thus the combinatorial problem can be solved without optimization. The remaining features in selection are classified using the subspace method based on the segmentation result of selected features.
|
|
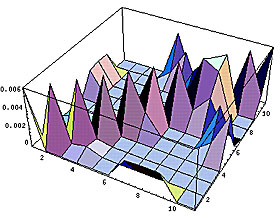
Feature correspondences Orthogonal projection matrix of shape space
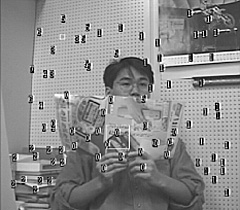
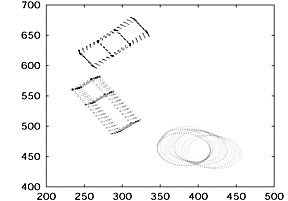
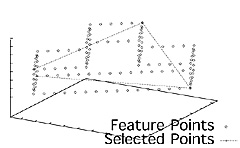
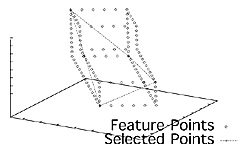
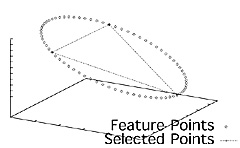
In above example, only 11 feature points were selected from 772 ones. Segmentation was done by just counting non-zero entities in 11x11 orthogonal projection matrix of shape space. The segmentation result of the selected features was used to segment remaining features. The following shapes of objects could be reconstructed from the segmentation result.
|
|
![]() Motion Segmentation Using Orthogonal
Projection Matrix of Shape Space and Discriminant
Criterion
Motion Segmentation Using Orthogonal
Projection Matrix of Shape Space and Discriminant
Criterion
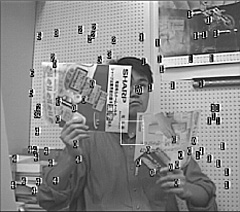
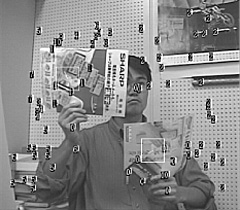
A novel algorithm for motion segmentation is proposed. The algorithm uses the fact that shape of an object with homogeneous motion is represented as 4 dimensional linear space. Thus motion segmentation is done as the decomposition of shape space of multiple objects into a set of 4 dimensional subspace. The decomposition is realized using the discriminant analysis of orthogonal projection matrix of shape space. Since only discriminant analysis of 1D data is needed, this analysis is quite simple. The algorithm based on the analysis is robust for data with noise and outliers, because the analysis can extract useful information for motion segmentation while rejecting useless one. The implementation results show that the proposed method is robust and efficient enough to do online task for real scenes. In an example shown blow, the parallel processing by two PC was used. The small rectangles show the extracted feature points, and the large rectangles show the position of the center of gravity of feature points regarded as a group with motion larger than 10 pixels. Motion segmentation was carried out every other 30 frames. Moving object was segmented from background and the separation of object was detected, although the feature correspondences contained many outliers due to matching errors and overlap between moving regions and background.
|
|