4K resolution snapshots
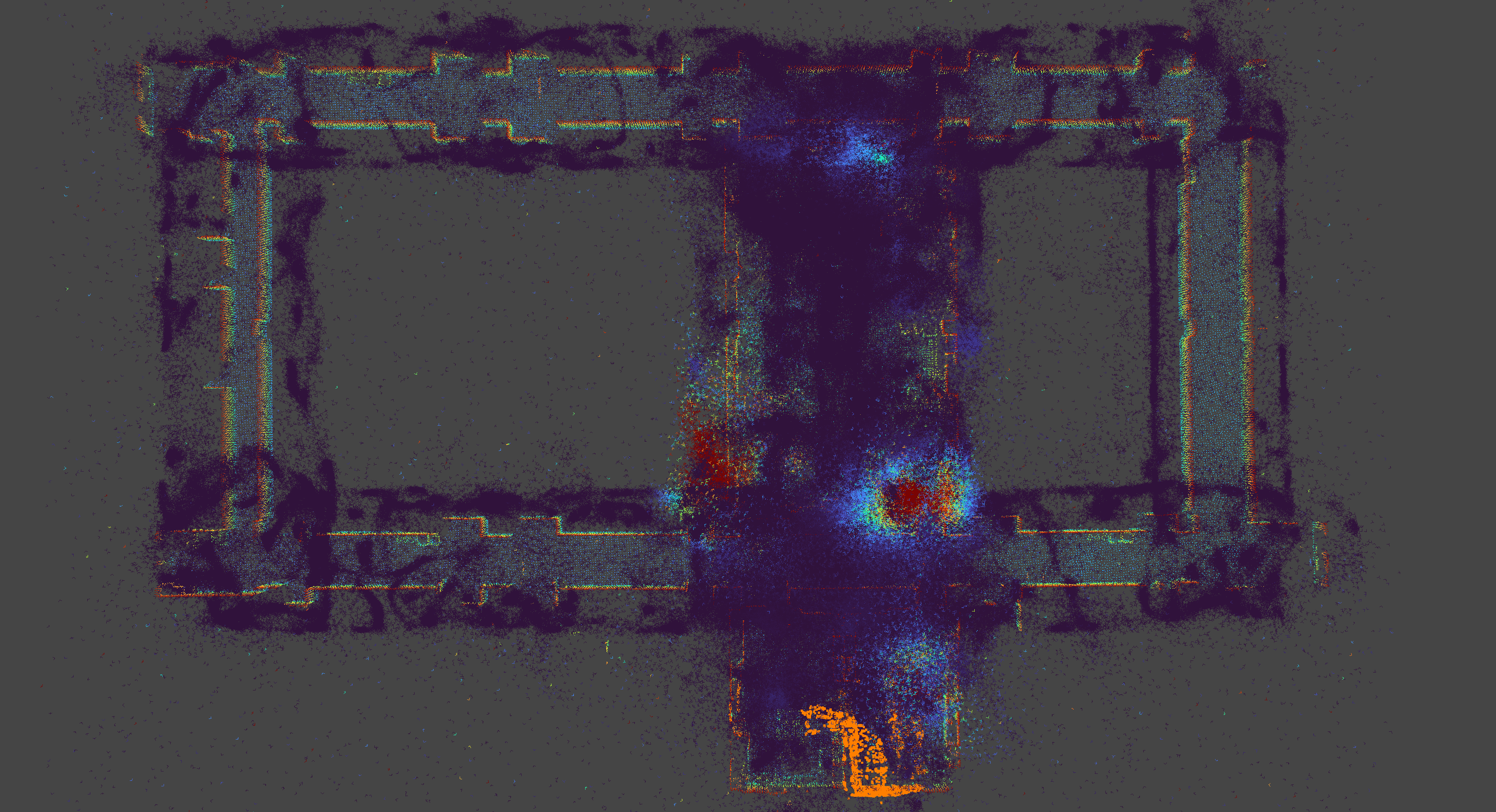
Click to open 4K PNG image (3.0 MB)
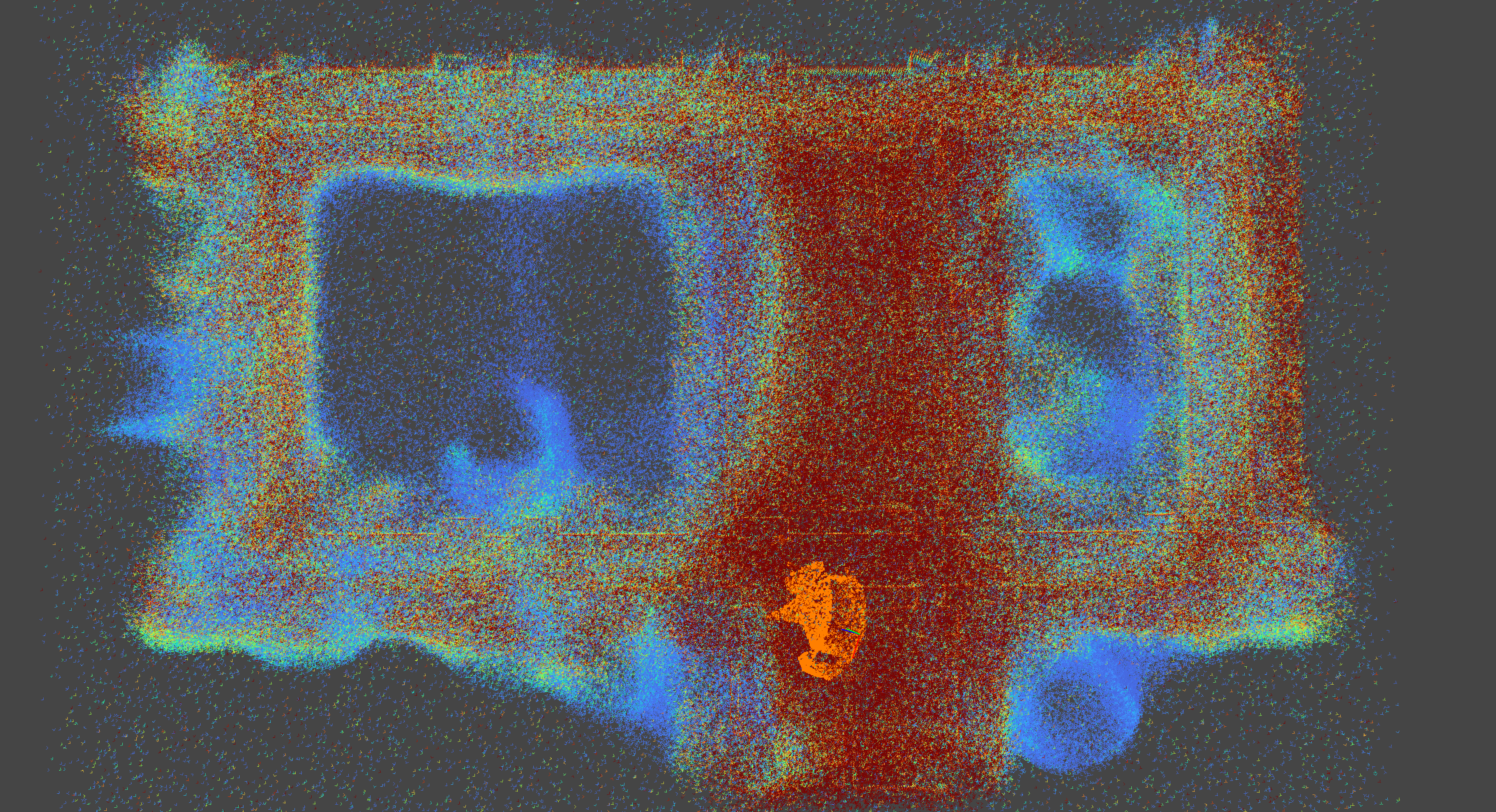
Click to open 4K PNG image (9.9 MB)
Click to open 4K PNG image (4.0 MB)
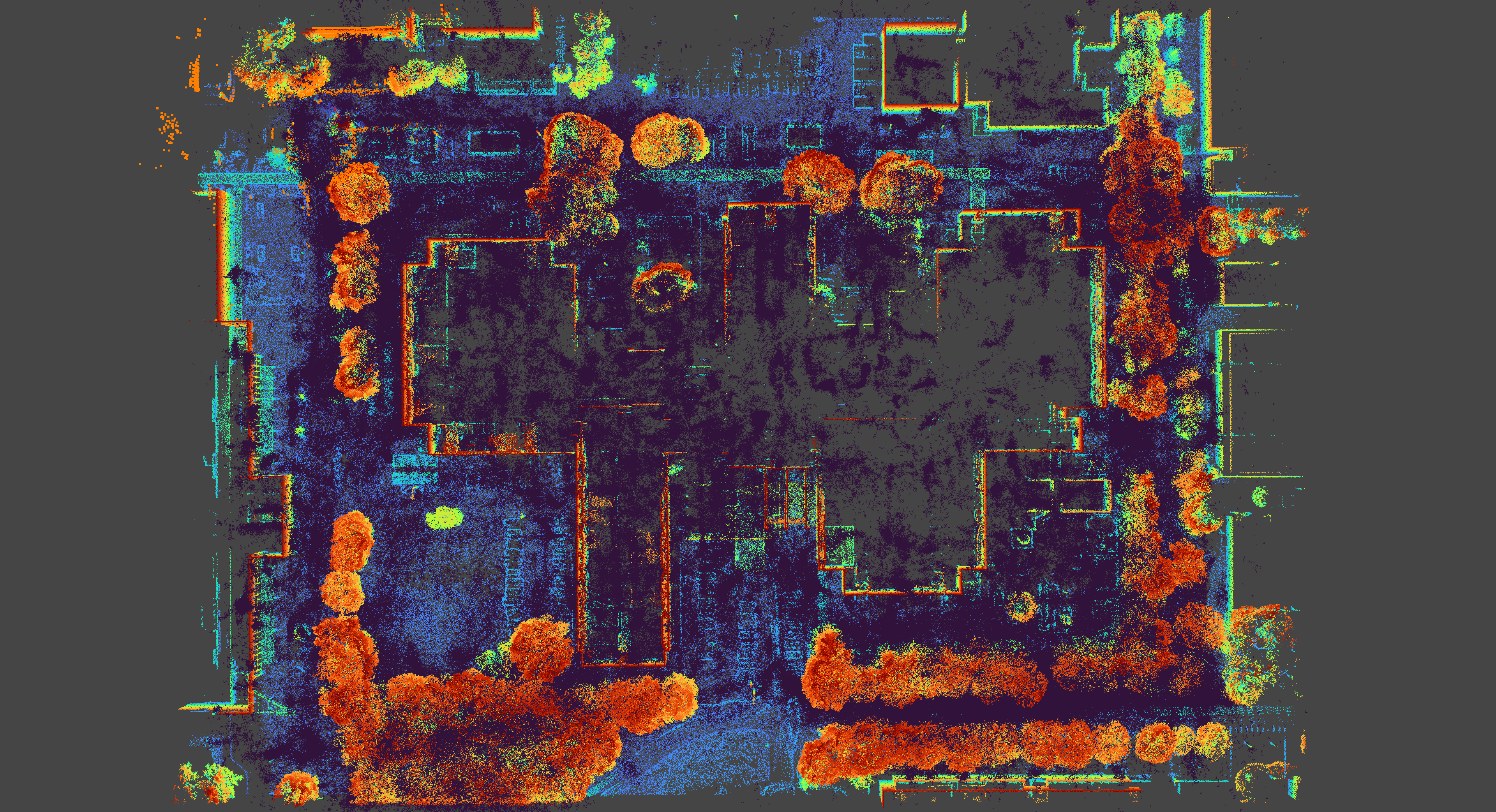
Click to open 4K PNG image (5.1 MB)
Click to open 4K PNG image (8.3 MB)