Flatwall experiment dataset
Download: https://zenodo.org/record/7641866
Description
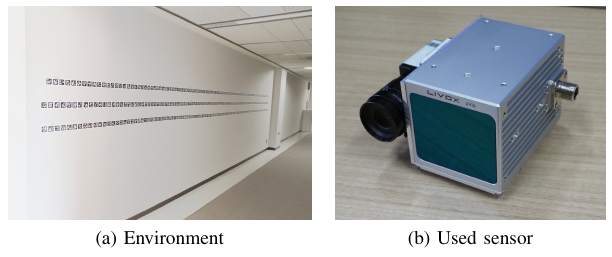
This dataset provides LiDAR-IMU sequences for evaluating odometry estimation performance in situations where LiDAR data becomes completely degenerated. A Livox Avia was used to record point cloud and IMU data, and the LiDAR was moved while facing to a flat wall. A camera rigidly attached to the LiDAR was used to observe visual fiducial tags (Apriltags) placed on the wall to measure the ground truth trajectory of the LiDAR.
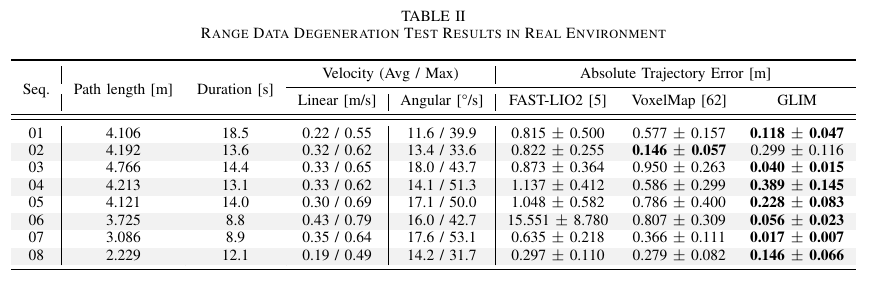
Estimation results
Video
flatwall_01:
Demonstration of the robustness of GLIM to momentary degeneration of range data: