強い磁化をもつ磁性体が存在することによって、局所的にその磁性体周囲の磁場がIGRFのような標準磁場からずれていること。
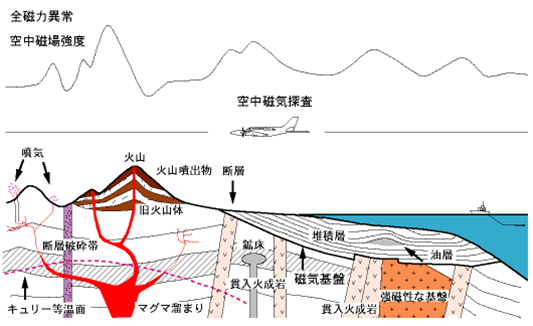
- 強い磁性を持つ物体(磁性体鉱物を多く含む岩石や鉄などの金属)が存在すること
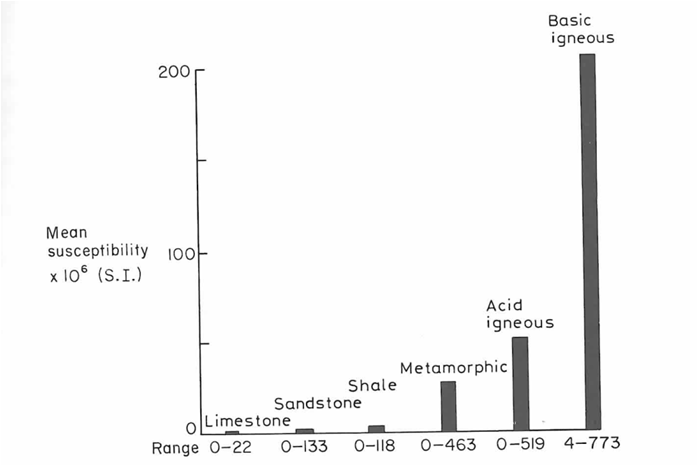
典型的な岩石の磁化率 Dobrin,1976
- 日本付近では強い磁化をもつ物体が孤立していれば北側に負、南側に正の異常が対になって出る。
逆帯磁(磁性体の磁化ベクトルが外部磁場と逆)であればその逆。
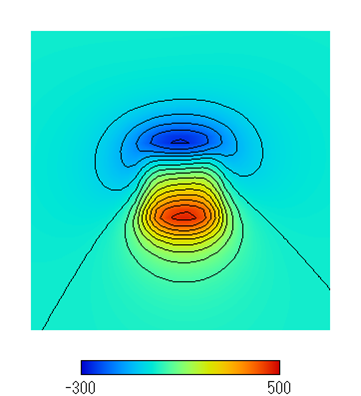
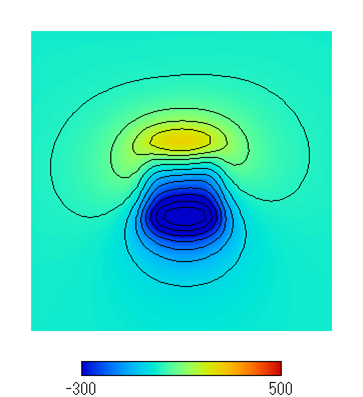
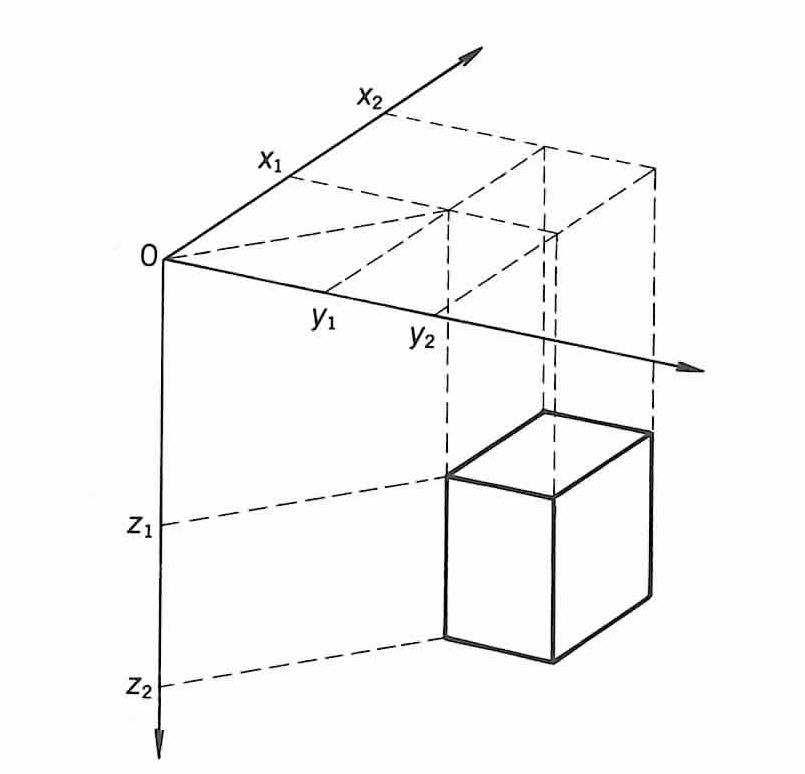
直方体による磁気異常:磁化強度 J=2.0 A/m, (左) D=0°,I=45°(右) D=180°,I=-45°
外部磁場の方向 D0=-10°,I0=48°
- 直方体モデル
具体的な計算方法はこちら
(ここへばブラウザの「戻る」で帰ってきてください)
- 明らかに隣接物と磁化強度に差がある場合(構造は同じで磁化が違う場合)
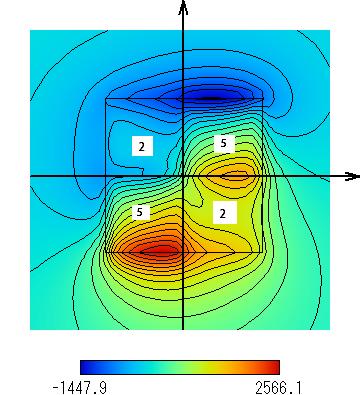
数字は磁化強度(A/m)をあらわす。磁化強度以外は全く同じ。上面深度は4つとも10m
- 明らかに隣接物と磁化強度に差がある場合(磁化は同じで構造が違う場合)
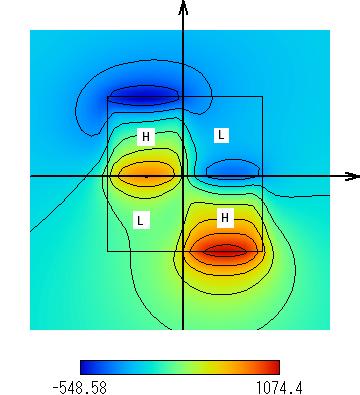
磁性体には同じ磁化(2A/m)を与えた。上面深度をHは10m、Lは1kmとした。
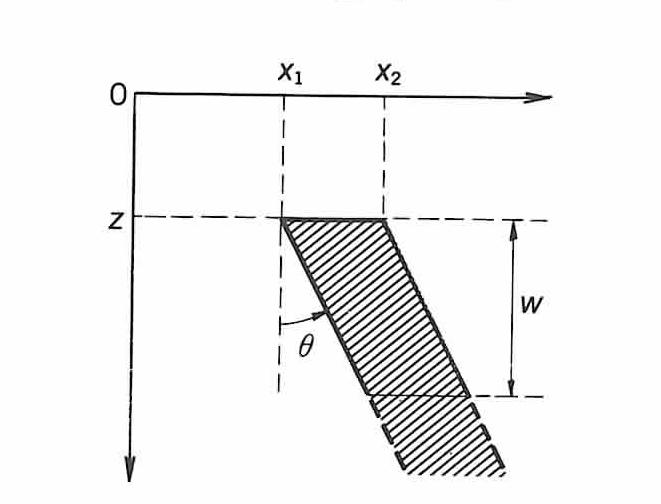
- 2次元ダイクモデル
具体的な式はこちら(PDF)
- X軸をN30Eとした20kmのライン上で0.05kmごとに計算されの磁気異常。
外部磁場(偏角-9°、伏角56°)と磁化ベクトルは平行。
磁化強度は1.5A/m
x1=9.5km、x2=10.5km、z=0.3km、w=10km
θを変えている。
- 構造境界の抽出を目的として磁気異常を測る
- 目的とするものと周囲との磁化構造の違い
- 主として磁鉄鉱をはじめとする強磁性鉱物の磁性の強さや鉱物量の違いを反映する
- 条件によっては重力よりもはるかに鋭敏
- 目的とするものと周囲との磁化構造の違い
- 必要なデータセット
- 測定位置(水平位置+測定高度)
- 測定点の全磁力値
- 測定時刻
- 定点観測磁場(地磁気観測所のデータを利用してもよい)
- 測定位置(水平位置+測定高度)
- 磁力計
- 野外での磁気探査でよく使われているのは地質構造調査ではその簡便さからプロトン磁力計が多く、埋没鉄探査では対象が小さいためにフラックスゲート磁力計、両コイル磁気傾度計が多いようである。
- 一般的な磁力計(物理探査ハンドブックP490)
原理 磁力計の種類 核磁気共鳴 プロトン磁力計 電子スピン共鳴 光ポンピング磁力計 磁束量子効果 SQUID磁力計 磁場中における物性:磁芯飽和特性 フラックスゲート磁力計 磁場中における物性:ホール効果 ホール素子 磁場中における物性:ファラデー効果 光磁気磁力計 電磁誘導:コイル回転・振動 アースインダクタ磁力計・振動コイル磁力計 電磁誘導:コイル移動 両コイル磁気傾度計 磁針:磁力を直接利用 伏角計・偏角計 磁針:磁力以外の平衡力利用 トーション磁力計・シュミット磁力計
- 野外での磁気探査でよく使われているのは地質構造調査ではその簡便さからプロトン磁力計が多く、埋没鉄探査では対象が小さいためにフラックスゲート磁力計、両コイル磁気傾度計が多いようである。
- 金属探知機
- 機体の近くに設置された磁力計センサーに対しては、機体が発する磁気の影響を除去するための装置が必要になる。
- 機体磁気の影響には、永久磁気成分と誘導磁気成分があり、さらに導体を貫く磁束が変化した時に導体中に流れる渦電流の影響、およびその他の磁性物質の移動や機体内電流の影響がある。
しかし一般に、探査飛行中は急激な機体姿勢の変化は避けるようにしており、観測に影響を及ぼす電源類の投入切断は行わないので、永久磁石成分と誘導磁化成分の機体磁気補償を行えばよい。
- このときの機体磁気ノイズの考え方は,機首、右、鉛直下方の機体磁気の方向をHh, Hs, Hvとして
Hh=Hph+A11Fh+A12Fs+A13Fv
Hs=Hps+A21Fh+A22Fs+A23Fv
Hv=Hpv+A31Fh+A32Fs+A33Fv
ここで各式右辺の最初の項は永久磁化を表す。
あとの3項は誘導磁化の効果であり、Fh,Fs,Fvは地磁気の機首、右、鉛直下方の各方向の成分である。
機首、右、で決まる平面に対する地磁気の伏角をθとし、
その平面内で機首方向を地磁気の方向から時計回りに測った角度をφとすると、地磁気の絶対強度をFとして
Fh=Fcosθcosφ
Fs=-Fcosθsinφ
Fv=Fsinθ
- 機体磁気の効果が地磁気の大きさに対して十分小さい時は、全磁力測定に及ぼす影響Hは磁気ベクトル方向の成分を考えればよく
H=Hhcosθcosφ-Hscosθsinφ+Hvsinθ
=C0+C1cosφ+S1sinφ+C2cos2φ+S2sin2φ
ここで=C0、C1、C2はθに依存するが、限られた範囲の調査では定数と考えてよい。
またS1、S2は他の項に比べて小さい。
- 機体磁気補償には、機体磁気を打ち消すために人工的磁場をセンサー付近に発生させる方法と、機体の姿勢に対するレスポンスをあらかじめ測定しておき、探査中に記録した機体の姿勢データを用いて補正計算を行う場合がある。前者は3軸コイルとパーマロイ片を用いる。
永久磁場成分はセンサーに対して機体に固定した座標系で一定のベクトル磁場であり、これと逆の人工磁場を3軸コイルシステムで加えることによって、誘導磁気成分はセンサーから見て直交する方向にあるものの、誘導磁気の影響が互いに打ち消し合うことを利用してパーマロイ片の設置位置の調整によって補償される(中塚ほか,1976)。
後者の機体姿勢データから補正計算を行う方法では、機体姿勢変化が全磁力測定に及ぼす影響を磁気的に静穏な空域(一般に高高度)での機体の振動実験で評価しておき、機体のrolling, pitching, yawingの三成分の姿勢を精密に測定する必要がある。
- 理論的には上記の式のA11からA33の12個のパラメーターを振動試験から求めこれを用いて補正する。しかし機体姿勢の測定は容易ではないので、通常は前者のシステムを用いてあらかじめ機体磁気の影響を減じておくことは有効である。
- 磁気異常は空間分布をもとめるので、位置情報はとても大事。
- 地上・海上・空中の全般にわたってGPS(Global Positioning System)による位置計測が行われるようになって、精度も向上している。ただし、どのような計測もかならず誤差を含むと思っていた方が良い。
- サーベイデザインの重要性
- 3つの孤立した直方体による磁気異常で全く構造が同じでも観測点の配置によって得られるパターンは違う。
- 初めの図
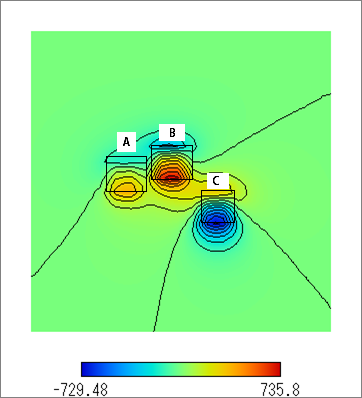
外部磁場:D=-9,I=56 磁化:A:J=1A/m, D=-9, I=56,B:J=2A/m,D=0,I=45,C:J=3A/m,D=180,I=-45
上面深度 (観測面からの深さ):A:300m, B:300m, C:500m
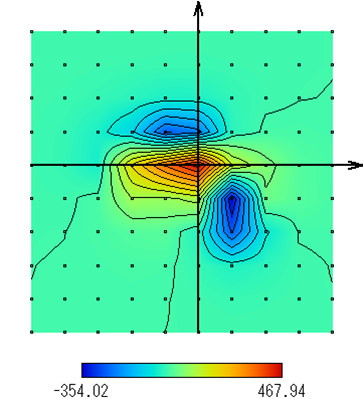
- 測定点間隔を変える
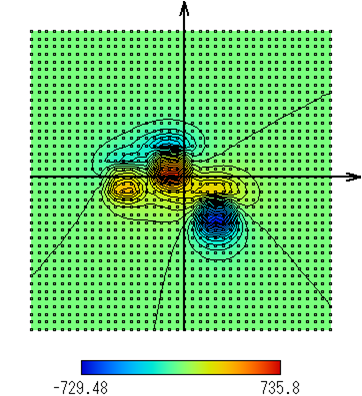

- 測定点間隔をずらす

- 初めの図
- 空中磁気における測線配置の目安
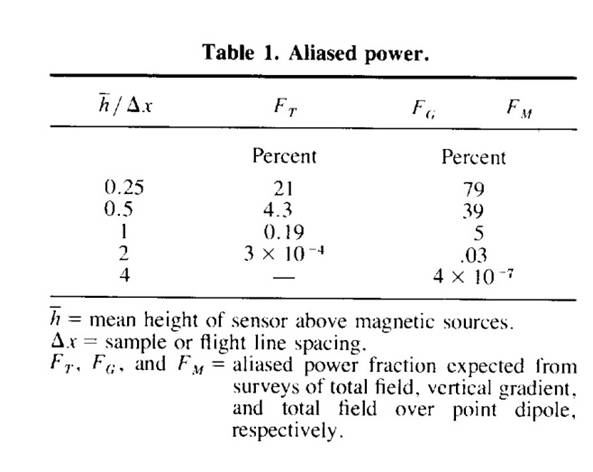
Reid, A.B., 1980, Aeromagnetic survey design: Geophysics, v. 45, p. 973-976.
- 測定高度:航空機の場合、飛行に制限がある。
- 測線間隔:飛行高度の半分位:測位システムの精度にもよる
- 測線走向:日本なら南北方向が最も望ましい。構造に直交の場合も。
- 交差測線配置:主側線の8-10倍の間隔で良い。
- 測定高度:航空機の場合、飛行に制限がある。
- 3つの孤立した直方体による磁気異常で全く構造が同じでも観測点の配置によって得られるパターンは違う。