General Hand-eye Calibration Based on Reprojection Error Minimization
- Kenji Koide
- Emanuele Menegatti
IEEE Robotics and Automation Letters/ICRA2019 presentation, Vol. 4, Issue 2, pp. 1021-1028, 2019
Abstract
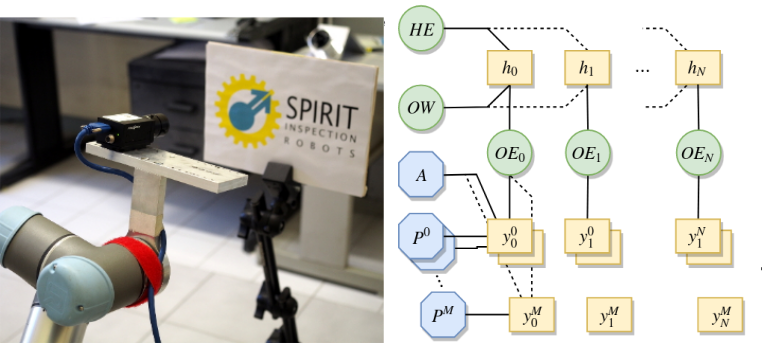
This paper describes a novel hand-eye calibration technique based on reprojection error minimization. In contrast to traditional hand-eye calibration methods, the proposed method directly takes images of the calibration pattern and does not require to explicitly estimate the camera pose for each input image. The proposed method is implemented as a pose graph optimization problem, so that it can solve the estimation problem efficiently and robustly, and it can be easily extended for different projection models. It can deal with different camera models (e.g, X-ray cameras with a source-detector projection model) by changing the projection model. Through simulations, we validated that the proposed method shows a good estimation accuracy, and it can be applied to hand-eye calibration with a source-detector camera model. The experimental results with real robots show that the proposed method is applicable to real environments, and it improves the quality of a task which requires accurate hand-eye estimation, like 3D reconstruction.
Related Work
General Robot-Camera Synchronization based on Reprojection Error Minimization
Kenji Koide and Emanuele Menegatti
Austrian Robotics Workshop (ARS2019), pp. 119-122, Steyr, Austria, May, 2019
pdf