Collision Risk Assessment via Awareness Estimation
Toward Robotic Attendant
- Kenji Koide
- Jun Miura
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020), Oct., 2020
Abstract
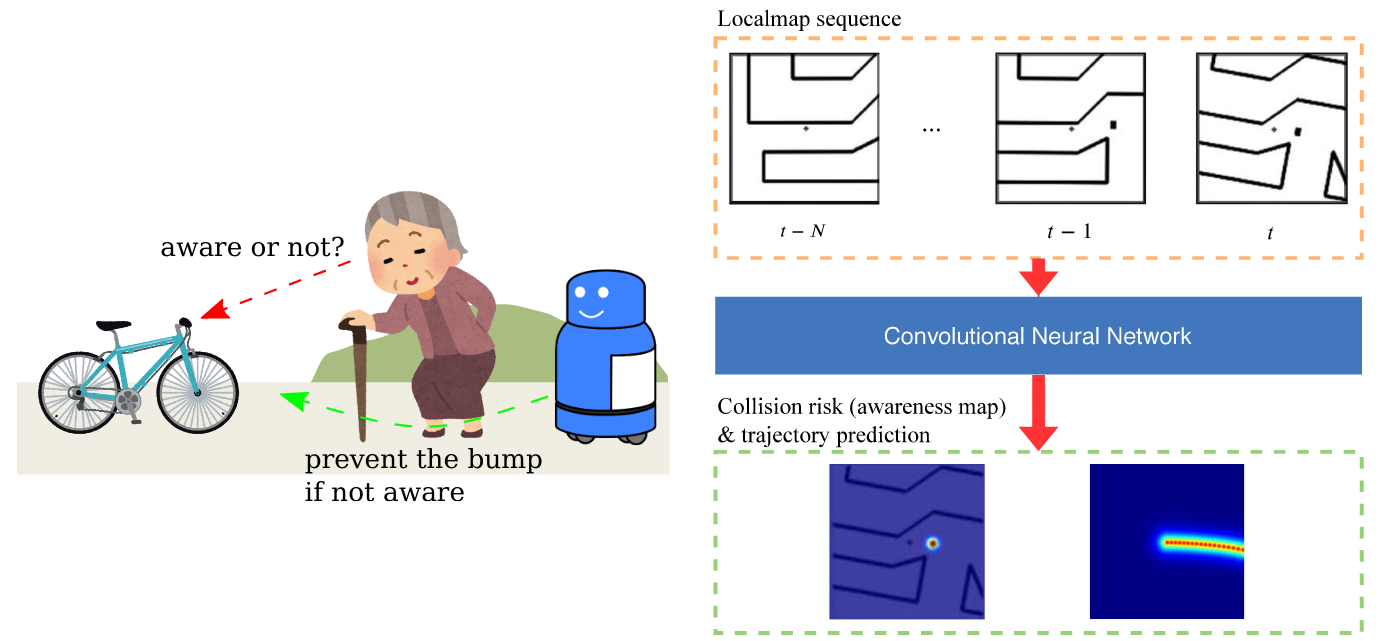
With the aim of contributing to the development of a robotic attendant system, this study proposes the concept of assessing the risk of collision using awareness estimation. The proposed approach enables an attendant robot to assess a person's risk of colliding with an obstacle by estimating whether he/she is aware of it based on behavior, and to take the requisite preventative action. To implement the proposed concept, we design a model that can simultaneously estimate a person's awareness of obstacles and predict his/her trajectory based on a convolutional neural network. When trained on a dataset of collision-related behaviors generated from people trajectory datasets, the model can detect objects of which the person is not aware and with which he/she at risk of colliding. The proposed method was evaluated in an empirical environment, and the results verified its effectiveness.