僗僺僯儞僌壛岺
丂僗僺僯儞僌壛岺偲偼丆夞揮偡傞惉宍宆乮儅儞僪儗儖乯偵斅忬傗娗忬偺慺嵽乮僽儔儞僋乯傪壛岺儘乕儔傗傊傜偱墴偟晅偗偰惉宍偡傞慪惈壛岺偺堦庤朄偱偁傞丏嬥懏傪嵽椏偲偡傞僔僃儖忬偺惢昳偺惉宍壛岺朄偲偟偰丆壠掚梡梕婍丆憰忺岺寍昳丆徠柧婍嬶丆捠怣乮僷儔儃儔傾儞僥僫側偳乯丆儃僀儔丆僞儞僋丆僲僘儖丆僄儞僕儞晹昳丆僞僀儎儂僀乕儖側偳偺晹昳丒惢昳偺惢憿偵峀偔梡偄傜傟偰偄傞丏偙偺壛岺朄偼弉楙嶌嬈幰偵傛傞崅搙側傕偺偯偔傝偺媄擻偲偟偰傕嬤擭拲栚偝傟丆椺偊偽俫俀儘働僢僩偺愭抂僇僶乕側偳偑偙偆偟偨庤嶌嬈乮傊傜峣傝乯偵傛偭偰惢嶌偝傟偨偙偲偑峀偔抦傜傟偰偄傞丏
丂僗僺僯儞僌壛岺偺摿挿偲偟偰丆
丂丂a. 僾儗僗惉宍偲斾傋暋嶨側宍忬偺惢昳偑惉宍壜擻丏
丂丂b. 惉宍宆偑侾屄偺傒偺偨傔壛岺偺弨旛偑梕堈丏
丂丂c. 壛岺椡偑彫偝偄偨傔愝旛偑僐儞僷僋僩丏
丂丂d. 愗嶍壛岺側偳偲斾傋嵽椏偑愡尭偱偒傞丏
丂丂e. 壛岺惛搙偑崅偔丆惢昳偺昞柺惈忬傕椙岲丏
側偳偑嫇偘傜傟傞丏偡側傢偪丆儔僺僢僪僾儘僩僞僀僺儞僌(b.)傗僱僢僩僔僃僀僾(d.)偲偄偭偨壛岺媄弍偵偍偗傞嵟嬤偺摦岦偲崌抳偡傞丏傑偨丆慪惈壛岺偵偍偄偰嬤擭拲栚傪廤傔偰偄傞拃師惉宍朄乮僀儞僋儕儊儞僞儖僼僅乕儈儞僌乯偺堦庬偲偟偰埵抲偯偗傞偙偲傕偱偒傞丏
丂偟偐偟丆偦偺帺摦壔偵娭偟偰偼慪惈壛岺暘栰偺拞偱傕抶傟偑栚棫偮丏斾妑揑娙扨側宍忬偺惢昳偵偮偄偰偼俶俠帺摦婡乮僗僺僯儞僌儅僔儞乯偵傛傞検嶻壔偑幚尰偟偰偄傞偑丆偦偺嫵帵嶌嬈偼尰嵼偱傕弉楙嶌嬈幰偺媄擻偵嫮偔埶懚偡傞丏偦偺尋媶偵偮偄偰傕懠偺壛岺朄偲斾妑偟偰偐側傝掆懾偟偰偍傝丆崙撪奜偲傕偵戝妛丒尋媶婡娭偱偼尋媶幰憌偑敄偄丏偙傟偼曄宍婡峔偑嶰師尦揑偱旕忢偵暋嶨側偨傔FEM僔儈儏儗乕僔儑儞摍偱廫暘埖偊側偄偙偲丆惂屼僷儔儊乕僞偑懡偔婡婍奐敪傪梫偡傞偙偲側偳偑尨場偲巚傢傟傞丏偟偨偑偭偰曄宍尨棟傕枹夝柧偺揰偑懡偔丆摿偵峣傝僗僺僯儞僌偲屇偽傟傞庤朄偱偼壛岺庤弴傕棟榑揑偵偼妋棫偟偰偄側偄丏偦偺偨傔幚嵺偺壛岺偱偼弉楙嶌嬈幰偺宱尡偵棅偭偰偄傞偺偑幚忬偱偁傞丏
丂堦曽偱丆儘儃僢僩尋媶暘栰偵偍偄偰偼丆戝妛丒尋媶婡娭偺尋媶幰偺旕惢憿嬈暘栰傊偺恑弌巙岦偵傛傝丆惢憿嬈偵偍偗傞嶻嬈墳梡偺尋媶偵偼堦庬偺嬻摯壔偑惗偠偰偄傞偲偄偆尰忬偑偁傞丏偦偺偨傔偵嶻嬈梡儘儃僢僩偺梡搑偼僴儞僪儕儞僌丒慻棫丒梟愙丒揾憰側偳媽棃偺儗僷乕僩儕乕偐傜偦傟傎偳峀偑偭偰偄側偄丏偙偆偟偨梡搑偵偺傒栚偑岦偗傜傟傞偨傔偵丆嶻嬈梡儘儃僢僩偼婛偵惉弉偟偨屆偄媄弍偱偁傞偲偺尒曽偝偊偁傞丏
丂尰嵼偺嶻嬈梡儘儃僢僩偼丆庡偵弉楙傪梫偟側偄儔僀儞嶌嬈幰偺戙懼偵憡摉偡傞丆晅壛壙抣偺掅偄扨弮孞傝曉偟嶌嬈偵梡偄傜傟丆崅懍壔偵傛傞検嶻擻椡偲掅壙奿壔偵傛傝傛偆傗偔嵦嶼惈傪堐帩偟偰偄傞丏偟偐偟丆惢憿嬈偵偍偗傞暿偺惗嶻宍懺偲偟偰丆宱尡傪愊傫偩弉楙嶌嬈幰偵偟偐偱偒側偄丆彮検偱傕晅壛壙抣偑旕忢偵崅偄傕偺偯偔傝偑條乆側尰応偱峴傢傟偰偄傞丏偙偆偟偨暘栰偵丆傕偭傁傜傾僇僨儈僢僋側儘儃僢僩尋媶偲偟偰拁愊偝傟偨姶妎僼傿乕僪僶僢僋惂屼側偳偺媄弍傪妶梡偟偰恑弌偟丆崅婡擻偺儘儃僢僩偱傕嵦嶼偺庢傟傞崅晅壛壙抣偺墳梡嶌嬈傪幚尰偡傞偙偲偑偱偒傟偽丆儘儃僢僩媄弍偺怴偨側儅乕働僢僩偑戝偒偔奐偗傞壜擻惈偑偁傞丏
丂儘儃僢僩岺妛偵偍偄偰偼儘儃僢僩傾乕儉偺椡惂屼偑挿擭偵傢偨傝尋媶偝傟丆埵抲乛椡僴僀僽儕僢僪惂屼丒僀儞僺乕僟儞僗惂屼側偳偵娭偡傞懡偔偺棟榑揑丒媄弍揑側拁愊傪桳偡傞丏偟偐偟丆儘儃僢僩尋媶幰偺惢憿嬈棧傟偲傕憡傑偭偰丆幚梡壔偝傟偰偄傞偺偼慻棫丒尋嶍側偳傢偢偐側庬椶偺嶌嬈偵偡偓偢丆晅壛壙抣惈偺崅偄桳岠側墳梡偵偮偄偰偼枹偩偵柾嶕偺忬懺偵偁傞丏
丂庤嶌嬈偵傛傞僗僺僯儞僌壛岺偱偼嶌嬈幰偺姶妎丆摿偵儘乕儔傪夘偟偰揱傢傞椡偺姶妎偑廳梫側栶妱傪壥偨偡偲尵傢傟偰偄傞丏傑偨僗僺僯儞僌壛岺偼嬊強曄宍偵傛傞壛岺偺偨傔丆懠偺慪惈壛岺偲斾傋偰壛岺椡偑偼傞偐偵彫偝偄丏惂屼僷儔儊乕僞偑懡偔壛岺偺帺桼搙偑崅偄揰偱傕儘儃僢僩偵揔偟偨嶌嬈偱偁傞丏庤嶌嬈偵傛傞惗嶻偑惢憿嬈偲偟偰惉棫偟偰偄傞偙偲偐傜傕傢偐傞傛偆偵丆懡昳庬彮検惗嶻偐偮崅晅壛壙抣偺壛岺朄偱偁傝丆椡惂屼儘儃僢僩偺嵦嶼惈偼崅偄丏
丂偦偙偱丆杮尋媶偱偼僗僺僯儞僌壛岺偵椡惂屼側偳偺儘儃僢僩惂屼媄弍傪摫擖偡傞偙偲偵傛傝丆壛岺偺僼儗僉僔僽儖壔丒僀儞僥儕僕僃儞僩壔傪偼偐傞丏嬶懱揑偵偼壛岺忬懺偺僼傿乕僪僶僢僋偵婎偯偒幚帪娫偱壛岺忦審傪挷惍偡傞偙偲偵傛傝丆寚娮偺敪惗傪枹慠偵杊偓丆弉楙嶌嬈幰偵旵揋偡傞崅昳幙偺惢昳偺惉宍傪栚巜偡丏傑偨儘儃僢僩摿桳偺懡帺桼搙惈傪妶梡偟偰丆廬棃偺帺摦婡偱偼幚尰偱偒側偐偭偨暋嶨側宍忬偺惢昳偺惉宍傪帋傒傞丏廬棃偺儘儃僢僩偺嶌嬈偑乽傕偺傪塣傇乿偙偲傪庡懱偲偟偰偄傞偺偵懳偟丆杮尋媶偱偼乽傕偺傪曄宍偡傞乿偲偄偆怴偨側梫慺偑梫媮偝傟傞丏偟偨偑偭偰丆偙傟傑偱偺儘儃僢僩媄弍偺拁愊傪棙梡偟偮偮傕丆挧愴揑側尋媶壽戣偺揥奐偑婜懸偱偒傞丏

帒椏
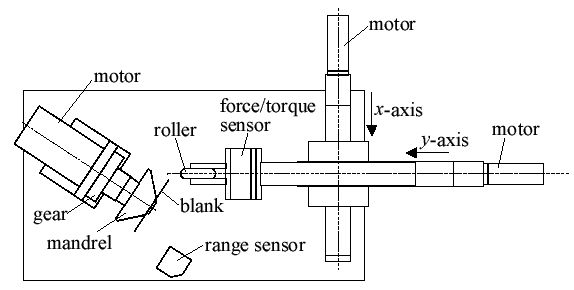
丂 椡惂屼傪梡偄偨僗僺僯儞僌壛岺
丂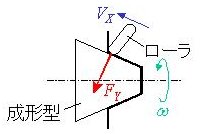
丒僗僺僯儞僌壛岺偵埵抲乛椡僴僀僽儕僢僪惂屼傪摫擖
丂 旕幉懳徧宍忬偺僗僺僯儞僌壛岺
丂
丒椡惂屼偱旕幉懳徧宍忬傪惉宍
丂 儕僯傾儌乕僞傪梡偄偨椡惂屼僗僺僯儞僌壛岺婡
丂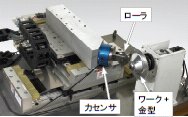
丒儕僯傾儌乕僞嬱摦偱堎宍宍忬惉宍傪崅懍壔丂價僨僆侾:丂
價僨僆俀:丂
價僨僆俁
丂 儕僯傾儌乕僞嬱摦偺幚梡婡僾儘僩僞僀僾
丂
丒僾儘僩僞僀僾傪婇嬈偲嫟摨奐敪丂價僨僆侾:丂
價僨僆俀
丂 俁俢僗僺僯儞僌媄弍
丂
丒3D-CAD偱嶌惉偟偨3師尦儌僨儖傪偦偺傑傑惉宍丂價僨僆
丂 俙俬僗僺僯儞僌壛岺媄弍
丂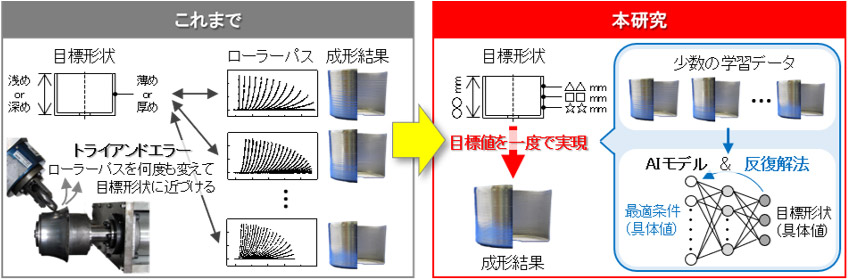
丒彮悢僨乕僞偐傜抁帪娫偱尰応娐嫬偵墳偠偨嵟揔壛岺忦審傪寛掕丂亅慺宍嵽嶻嬈偵偍偗傞彫婯柾惢憿尰応偺DX偵峷專偡傞嶌嬈巟墖斈梡AI僣乕儖亅