自律走行を伴う移動サービスを身近で当たり前の社会へ

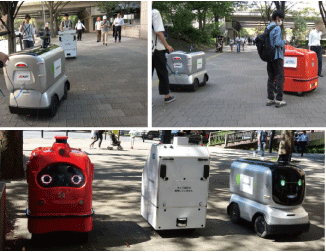
青海エリアでサービスロボットの社会実装を加速するための活動をしています。
多様なロボットと人・街との共生を目指します。
多様なロボットと人・街との共生を目指します。
プロジェクト概要
ROS Navigationスタックなどのオープンソースを活用することで,基本的な自律走行の実装は容易になってきました.
しかし,街中で自律移動ロボットを見かけることはまだ少なく,実用化には多くの技術的・社会的課題があります.これらの課題を解決するためには,実証を重ねることが不可欠です.
自律移動技術は,移動支援,配送,案内,警備など,さまざまな分野での活用が期待されています.
本プロジェクトでは,青海エリアをロボットの実証フィールドとして活用し,課題解決,普及加速に向けた活動を推進しています.
技術的な課題に加え,安全性,社会受容性,法規制,新たなビジネス創出など,多面的な視点から社会実装に向けた取り組みを進めていきます.
主な取り組み
- 青海エリアでの公道実証の推進と事業者支援
- 強化学習を活用した都市環境下での制御技術の開発
- 基盤モデルを活用した汎用的な自律移動技術の開発
- 複数事業者のロボット混在を想定した運行管理システムの設計
今後の展望
2025年度には,多数の遠隔操作型小型車による近接監視の実証を開始しました.今後は,遠隔監視の本格的な実施や,脚ロボットの公道実証実現に向けて活動していきます. また,強化学習や基盤モデルを活用した自律移動技術の開発を進め,事前の人手による作りこみを必要とせず,多様な状況に柔軟に対応できる高度な自律技術の確立を目指します. 将来的には,ロボットが日常的に活躍する持続可能な社会の実現に貢献することを目標としています.
これまでの活動
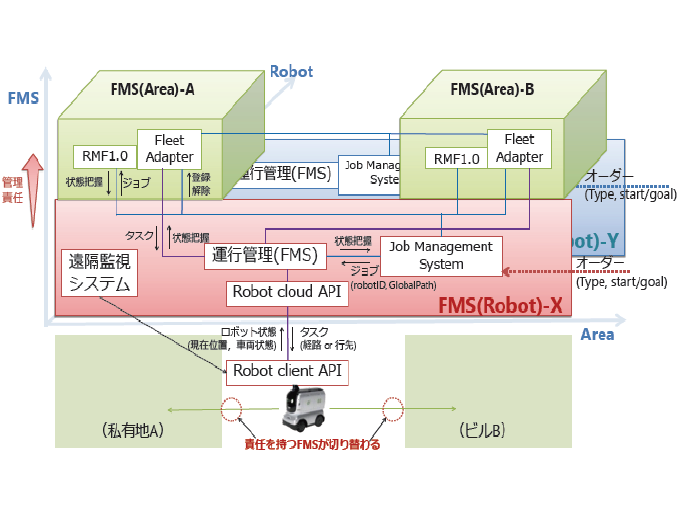
Robomech2026で複数事業者混在を前提とした運行管理システムを発表
NEDO AIセーフティプロジェクトの一環として,複数事業者のロボットが同一空間に混在する環境に向けた運行管理システムを提案しました. ロボット管理とエリア管理の運行管理を分離し,移動に応じて管制主体を切り替えることで公道/私有地を跨ぐ広域走行を実現します. プロトタイプを実装した実機ロボット実証で基本性能を確認するとともに,機能ごとに3つのリポジトリに分けてソースコードを公開しました。 今後も継続的に機能拡張を進めていきます。
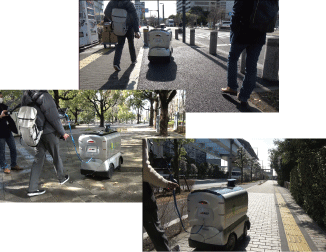
2025年10~2026年3月 第一回 一般参加公道自律走行実証
公道自律走行実証したい事業者・研究者を対象に,青海エリアでの公道自律走行実証の機会を提供しました。10月~3月の半年間の実験計画で,遠隔操作型小型車16機,4脚ロボット6機の実験申請を行いました。
残念ながら,4脚ロボットは法律上の車両区分の定義がないため,分離措置を講じない実証は認可されませんでしたが,車輪型の遠隔操作型小型車は,延べ100回を超える実証を実施しました.
2025年2~3月 青海実証キックオフ
実証推進の課題や事務局の役割を整理するため,実証支援活動のキックオフとして,産総研のhacobieと,都産技研のMiniTaurousで警察への公道実証申請・自律走行実証を実施しました.3月21日には,今後の実証実施に興味のある方向けに走行実証の見学会を開催し,約25名の参加がありました.
2024年9月 西新宿 NEDO自律走行実証
NEDO先導研究プログラムの一環として,西新宿エリアでの公道自律走行実証を実施しました.各社のロボットが共通で利用可能な3次元地図仕様を検証するため,産総研hacobieとロボットメーカ2社のロボット計3機で,市場調達可能な3次元地図を用いた自律走行実証を行いました.

2023年3月 柏の葉で配送ロボット4機の走行実証
PRISM事業の一環として,柏の葉キャンパス駅周辺エリアで,配送ロボット4機の自律走行実証を行いました.将来の配送ロボットサービスの実現に向けて,FMS(Fleet Manegement System)による全機の状態管理やクラウドサービスからの配送指示に基づく自律走行をテストしました.
© Copyrights Yoko Sasaki. All Rights Reserved
Created with Marco template by TemplateMag