半自動・準受動型乗用二足歩行機BiTrekker
脚式自転車・脚式バイク: 人間機械協調による2足歩行システム
参照先(RSJ2010)
参照先(Robomech2010)
参照先(Robomech2008)

搭乗型受動歩行機(シミュレーション・モデルとプロトタイプ)
受動歩行ベース(人力)二足歩行機
乗っているヒトにも頑張ってもらう。
- 乗っているヒトの方がロボットよりも
- 安定化が上手であり、
- 長時間動ける。
- アシスト自転車やSegway(R)のような乗用二足歩行機(ロボット)
- ヒトとバランス維持を分担
- ヒトと動力を分担
開発の3段階とヒトの介入比率
- 開発の初期段階では、ヒトの介入比率を高くする。
- 竹馬に近い、歩行補助具
- 一種のExoskeleton
- 中間段階で、受動歩行(動力・制御を用いない)を取り入れる。
- 暴走の程度が低い
- 操縦時の挙動が直感的
- 効率的な運動パタンの探求
- 最終段階では、脚式Segway(R)を目指す。
- 動力と自動制御を導入
- 重心移動や直接的介入で操縦
第1段階 サドル・ハンドル付き竹馬
- 脚の中に弾性体を仕込む。
- サドルにより体重を一部支持し、膝への負担を軽減。
- ペダルにより、脚の振り出しと伸縮を直接操作。
- Yawモーメントは、上体で抑制。
- 上体の転倒を防ぐために、股関節二分機構(Bisecting hip mechanism)を導入。
- (非装着型下半身Exoskeleton)
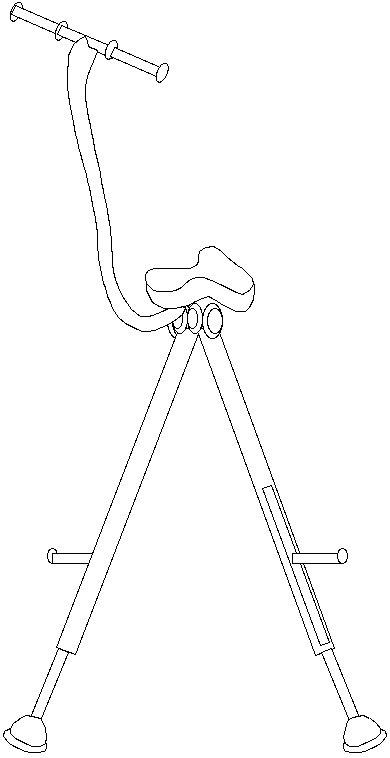
サドル・ハンドル付き竹馬
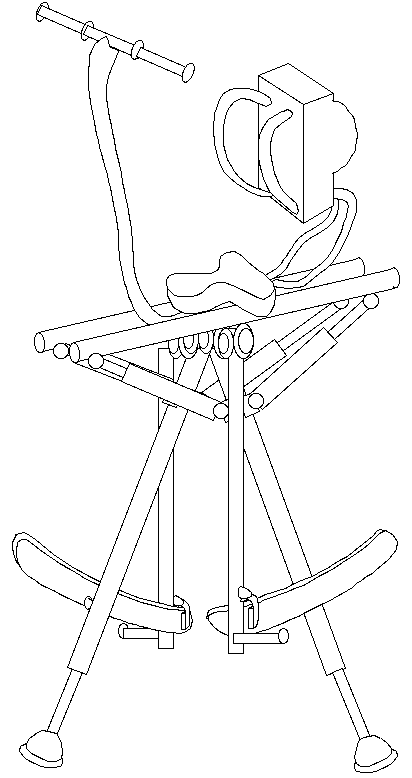
第2段階 搭乗型受動歩行機
- ペダルと脚を切り離し可能に。
- 安定性確保のために足裏付加。
- 上体の揺動で、バランス維持と推進力の注入を行う。

搭乗型受動歩行機
第3段階 脚式Segway(R)
- 油空圧等で、脚振りを能動化。
- 必要時は、脚を直接ヒトが制御。
- 揺動によるバランス維持や重心移動での速度の指令を行う。
脚式Segway(R)
シミュレーション
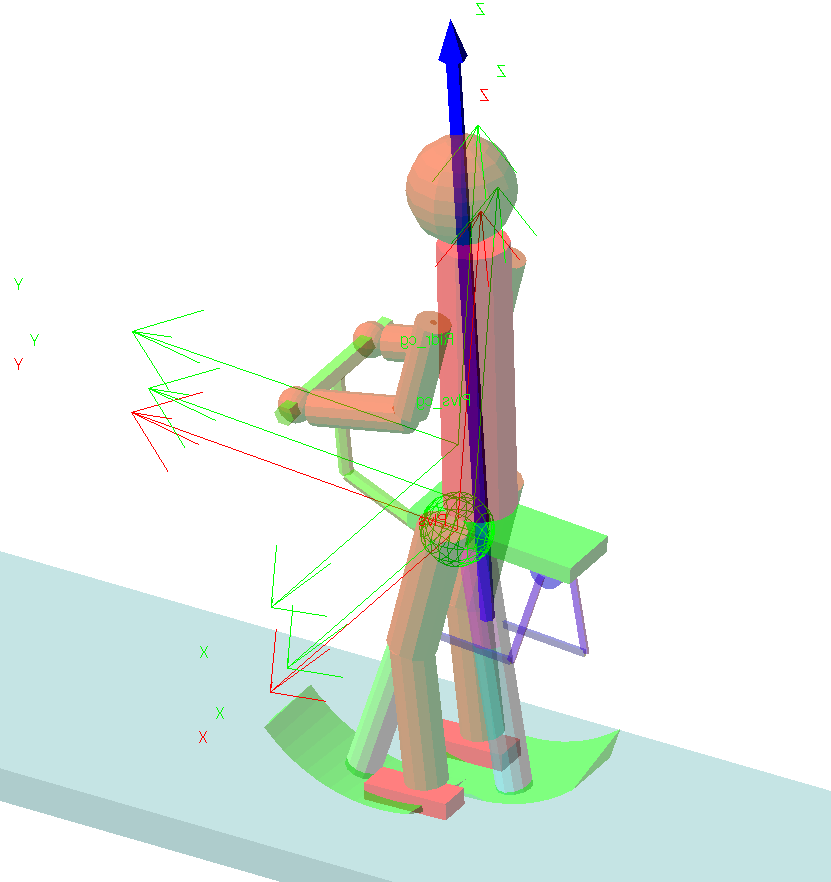
シミュレーション結果(第2段階 搭乗型受動歩行機)

搭乗型受動歩行機の歩行シミュレーション [mp4:1.4MB]
シミュレーション・モデルの仕様
- 動力学シミュレータDADS使用
- 搭乗者の運動は開ループ(安定性はない)
- 脚長は0.8[m]
- 搭乗者: 66[kg]
- 座面: 16[kg]
- 歩行機上腿: 2.9[kg]
- 歩行機下腿: 3.4[kg]
- 歩行機足部: 0[kg]
- 完全非弾性衝突
将来: 上体の動きで足運びを誘導
メモリ・ベースト制御による
旧型シミュレーション・モデル(第2段階 搭乗型受動歩行機)
- 動力学シミュレータDADS使用
- 搭乗者の運動は開ループ(安定性はない)
- 脚長は1[m]
- 搭乗者: 67[kg]
- 座面: 10[kg]
- 歩行機上腿: 6[kg]
- 歩行機下腿: 4[kg]
- 歩行機足部: 0[kg]
- 完全非弾性衝突
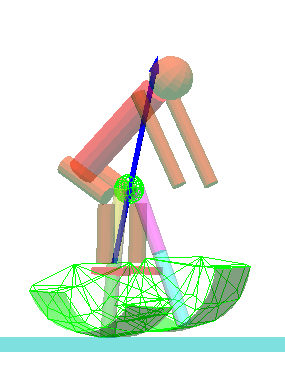
旧型搭乗型受動歩行機
シミュレーション結果