研究紹介
段差踏破性能,狭隘部走行性能,高所点検性能を同時に満たすマイクロドローン搭載小型ロボットDIR-3を開発
マイクロドローン搭載小型点検ロボットDIR-3の紹介
本研究では、従来のロボットでは調査困難な環境において、段差踏破性能、狭隘部走行性能、高所点検性能を同時に満たすロボットシステムを新規に提案しました。
具体的には、360度回転可能なコの字型アームを搭載し、段差踏破性能と狭隘部走行性能を満たす小型クローラロボットの研究開発に加え、高所点検性能に
優れたマイクロドローンを融合した複合型のロボットシステムを開発しました。実証では、自らの1.5倍の高さの段差昇降、クローラロボット上部への安定したマイクロドローン
着陸、高所壁面の点検、さらにマイクロドローンのクローラロボットへの追従制御の検証を行い、提案ロボットシステムの有効性を確認しました。今後は、マイクロドローンの
相対位置推定機構を用いて、コンクリート壁面をスキャンするように飛行させ、自動的に壁面ひび割れ検知用パナラマ画像を生成する手法について研究を行います。
単眼カメラ、AIデプス推定による障害物自律回避移動の実現
AIデプス推定による障害物自律回避移動の様子
本研究では、単眼カメラとディープラーニングを用いた自律屋内ナビゲーション手法について研究を行っています。
自律ナビゲーションシステムは2つの部分に分かれており、1つはカメラ画像から深度マップを作成するためのFully
Convolutional Network(FCN)になります。訓練されたFCNから推定された深度マップと開発したナビゲーションアルゴリズムにより、
屋内環境で進行可能な移動方向をリアルタイムに生成することができ、ハードウェアを用いた検証で自律障害物回避機能を実証しました。
AIによる障害物高さ推定の様子
もう一つは、ロボットによる段差昇降のための障害物高さ推定機構で、
YOLO(You Only Look Once)で認識した特定形状のバウンディングボックスとロボットからの距離情報、カメラの焦点距離を用いて
高さを推定する手法です。映像から、認識したBOXの高さがリアルタイムに表示されていることが分かります。
配管内打音検査ロボットの開発
配管内打音検査システムの概要
 現在の社会インフラ及び産業インフラの多くは高度経済成長期に建設されたものが多く、その老朽化が問題となっています。
中でも化学プラント等の配管では保温材下の腐食が進行しており、穴が空いた場合、重大な事故を引き起こす恐れがあります。
そこで容易で安価なスクリーニング検査手法として、配管内打音検査ロボットシステムの開発を行っています。
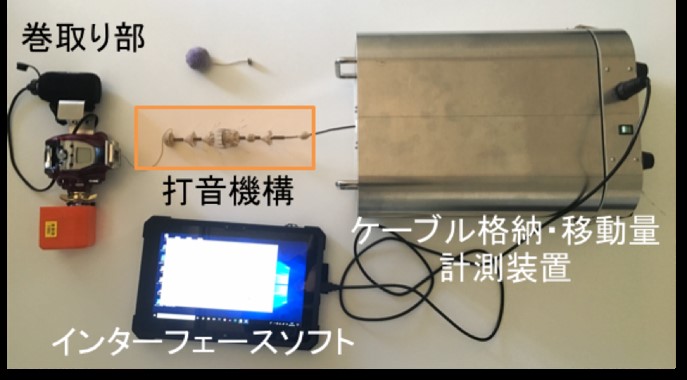
配管内打音検査ロボットシステムは、配管径に応じて変更可能な打音機構、全方位カメラ機構、ケーブル格納・移動量計測装置、
リール機構、インターフェイスソフトウェア等から構成されます。
このロボットで記録した打音をAIを用いた音響解析にかけることで異常部・正常部を判断します。
現在の社会インフラ及び産業インフラの多くは高度経済成長期に建設されたものが多く、その老朽化が問題となっています。
中でも化学プラント等の配管では保温材下の腐食が進行しており、穴が空いた場合、重大な事故を引き起こす恐れがあります。
そこで容易で安価なスクリーニング検査手法として、配管内打音検査ロボットシステムの開発を行っています。
配管内打音検査ロボットシステムは、配管径に応じて変更可能な打音機構、全方位カメラ機構、ケーブル格納・移動量計測装置、
リール機構、インターフェイスソフトウェア等から構成されます。
このロボットで記録した打音をAIを用いた音響解析にかけることで異常部・正常部を判断します。

AIを用いた打音音響解析手法
打音音響解析の前処理
取得した打音例
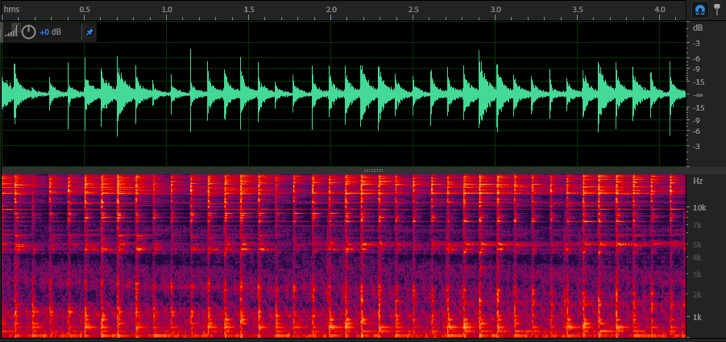
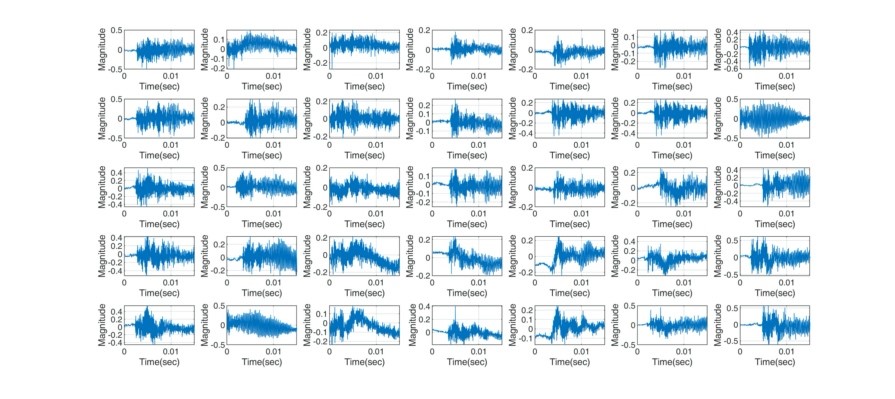 打音解析の前処理として、録音された打音データに対して、ピークを基準に打音の分割処理を実施します。
各打音の音量の正規化及びFFT処理を行い、各打音1536次元のデータを入力として異常部の検出を行います。
打音解析の前処理として、録音された打音データに対して、ピークを基準に打音の分割処理を実施します。
各打音の音量の正規化及びFFT処理を行い、各打音1536次元のデータを入力として異常部の検出を行います。
(手法に関しては後日更新します。)
自律分散的ネットワーク構成手法とは

自律分散的ネットワーク構成手法は、無線センサネットワークなど多数のIoTノードからの情報を基地局に集約する際に 問題となっていた通信衝突によるスループットの悪化を回避し、スケーラブルかつ様々なネットワークトポロジーに対応、 また無線ネットワークの大きな課題である隠れ端末問題、さらし端末問題を自律分散的に解決する手段を提供します。たとえば、 議長のいない会議で参加者が公平に発言するにはどうしたら良いかという問題と似ています。すぐにお互いの発言がぶつかることが 予想されますが、提案手法ではお互いが前の発言者との間隔を一定に保つように調整し合うことで、徐々に発言の間隔が均等に なっていきます(時分割通信)。また、大規模なメッシュネットワークなどでは、2ホップ離れたノード同士が同時に発言することでその間に いるノードがデータを受け取れなかったり(隠れ端末問題)、また片方が発言し続けることでもう片方が発言できない(さらし問題) などの問題がありますが、提案手法では、隣のノードから2ホップ先のノードの情報を取得することで、それらうまく回避しています。 本手法を用いることで、多数のノードからの情報を効率よく基地局に集約できるため、スマート工場、スマート農場、緊急時ネットワーク、 ロボット間通信等、各種IoTアプリケーションに活用できます。現在は、複数移動ロボット間の通信に応用するべく研究を進めています。
地滑り検知IoTノードの開発 (2014~2015年度 NEDOプロジェクトで実施)

無人調査用プラットフォーム車両CRoSDIの開発 (2014~2017年度 NEDOプロジェクトで実施)
 無人調査プラットフォーム車両CRoSDI(Crawler Robot System for Disaster Investigation)は、土砂災害、トンネル災害、火山災害時の遠隔操作型情報収集ロボットです。
ベースに三角形のクローラが2つあり、強力な前アーム、後ろアームを搭載しています。
前アームは、遠隔から土砂サンプリングが行えるバケットや、小型移動点検ロボットDIR-3を搭載可能な台を付け替えることができ、後ろアームには、火山灰等を層状のまま採取可能な
管入式サンプリング装置を備えています。前後アームは、250kgの車体を持ち上げられるほど強力で、30cm程度の段差を乗り越えることも可能です。車両上部には開発したコント
ローラユニット他、無線LAN用アンテナ、ズーム機能を有する遠隔操作カメラ、サーモグラフィーカメラ、GPS、IMUユニット、ガスセンサ等が載っています。通信は、基地局と2.4GHzのWiFiで接続され、
見通し最大通信距離は1km程度です。中継車両を用いることで、トンネル内奥(1km程度)の探査も可能です。これまで複数の現場実証試験を実施してきており、遠隔操作による現場の情報収集
を行うことができます。
無人調査プラットフォーム車両CRoSDI(Crawler Robot System for Disaster Investigation)は、土砂災害、トンネル災害、火山災害時の遠隔操作型情報収集ロボットです。
ベースに三角形のクローラが2つあり、強力な前アーム、後ろアームを搭載しています。
前アームは、遠隔から土砂サンプリングが行えるバケットや、小型移動点検ロボットDIR-3を搭載可能な台を付け替えることができ、後ろアームには、火山灰等を層状のまま採取可能な
管入式サンプリング装置を備えています。前後アームは、250kgの車体を持ち上げられるほど強力で、30cm程度の段差を乗り越えることも可能です。車両上部には開発したコント
ローラユニット他、無線LAN用アンテナ、ズーム機能を有する遠隔操作カメラ、サーモグラフィーカメラ、GPS、IMUユニット、ガスセンサ等が載っています。通信は、基地局と2.4GHzのWiFiで接続され、
見通し最大通信距離は1km程度です。中継車両を用いることで、トンネル内奥(1km程度)の探査も可能です。これまで複数の現場実証試験を実施してきており、遠隔操作による現場の情報収集
を行うことができます。
M-TRANの研究開発
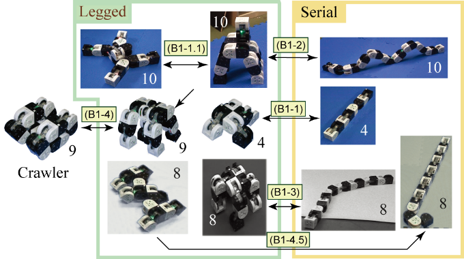

分散型機械システム(モジュラロボット)の研究として、以下を実施しました。
・モジュラロボットの研究
複数のロボットモジュールが機械的、電気的に結合することで様々な形態・機能を発現するロボットシステムの研究
・モジュラロボットの運動・変形制御
CPG(Central Pattern Generator)を用いた結合多自由度構造によるダイナミックな運動制御、変形による全体移動制御に関する研究
詳細は、こちら(M-TRANのページ)をご覧ください。