| Top | Studies Top | My profile | Links | Conference | English |
|
Last Up Date 04/09/07 My Research 低侵襲医用機器の位置制御
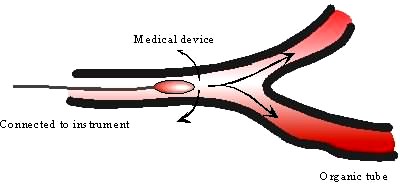
カテーテル,あるいは小さな体内用カプセルの方向を体の外からコントロールするために,磁界による制御機構を考えました.この方式の特徴は,磁界を用いることによって,ワイヤレスで方向を制御できることにあります.さらに体内用デバイスには,磁性体を取り付けておくだけでよいので,スペースの問題も解決できる利点があります. 磁界による誘導の可能性を検証するために,磁界強度の変化による吸引力の測定を行い,実際にどの程度の力を得ることが出来るのかを計測しました.さらに,アクリルパイプ内で小型プローブを用い磁界による誘導が行えるのかどうかを実験しました. その結果,心臓の左冠動脈など特定の部位で一方向の制御であれば,低出力のコイルで十分対応が可能であり,非常にコンパクトなシステムで構成することができることを示しました.さらに,本研究で示した方式は,同時に振動による摩擦制御も行えることを示しました. 参考文献
|
|
 ご質問等はk.yoshinaka@aist.go.jpまで
ご質問等はk.yoshinaka@aist.go.jpまで