|
Last Up Date 04/09/07
My Research
低侵襲医用機器の体内移動機構
- スパイラルリブ型体内推進機構について提案し,モデル実験により,理論,実測両面から推進力発生の可能性を示しました.
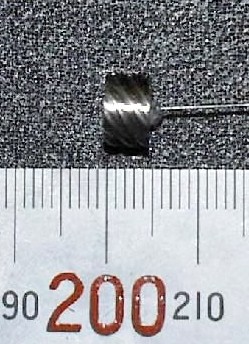
- 実際に生体内で用いることのできるスケールのスパイラルリブを製作し,生体外,生体内における本機構の推進特性を明らかにしました.
- 流体潤滑効果を利用した往復動型推進機構を新たに提案し,その推進機構,ならびに推進特性について明らかにしました.
|
|
|
Image of spiral ribbed impeller system
|
Spiral ribbed impeller
|
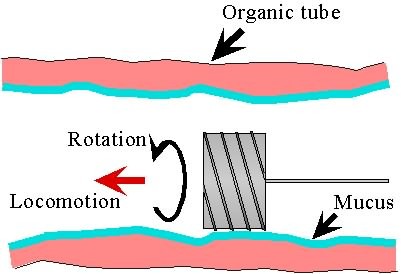
スパイラルリブ型推進機構
スパイラルリブ型推進機構は,流体潤滑理論を応用し,自ら推進できる機構を持つ新しいトラクションドライブシステムです.
斜めに配列したリブを持つ円筒面を回転させ,相手面との間の粘液によって生じるせん断力を回転軸方向の推進力に変換します.
往復動型体内推進機構
往復動型体内推進機構は,スパイラルリブ型とは異なる方式で,流体潤滑により,進行方向に移動するときの摩擦力が逆方向に移動するときの摩擦力より小さくなるように設計されています.これより,本体が進行方向に伸縮し摩擦を受ける部分が往復動を繰り返す時に生まれる摩擦力の差を利用し,推進するものです.
上記2つの推進機構ともに,生体内でこれを用いる場合,生体組織とこのデバイスとの間には粘液が存在するため,理論上,生体組織を損傷することなく,生体内の推進が可能であると考えられます.また,これらの機構はデザインがきわめてシンプルなため,小型化も容易であると考えられます.将来的にはマイクロマシン等の移動機構として利用できる可能性があります.
参考文献
- K. Ikeuchi, K. Yoshinaka, N. Tomita, "Low invasive propulsion of medical
devices by traction using mucus", Wear, Vol.209, pp.179-183, 1997.
- K. Yoshinaka, N. Tomita, K. Ikeuchi, "Experimental study of hydrodynamic
propulsion of a medical device with a spiral ribbed impeller", Wear,
Vol.220, pp.141-144, 1998.
- Zhou. YS., Quan. YX., Yoshinaka., K. Ikeuchi. K, "A new medical microrobot
for minimal invasive surgery", I Mech E, Part H Journal of engineering
in medicine, Vol.215, pp.215-220, 2001.
|
 ご質問等はk.yoshinaka@aist.go.jpまで
ご質問等はk.yoshinaka@aist.go.jpまで