The code of the successor project (GLIM) is available at https://github.com/koide3/glim
Globally Consistent 3D LiDAR Mapping with
GPU-accelerated GICP Matching Cost Factors
- Kenji Koide
- Masashi Yokozuka
- Shuji Oishi
- Atsuhiko Banno
IEEE Robotics and Automation Letters, 2021
Abstract
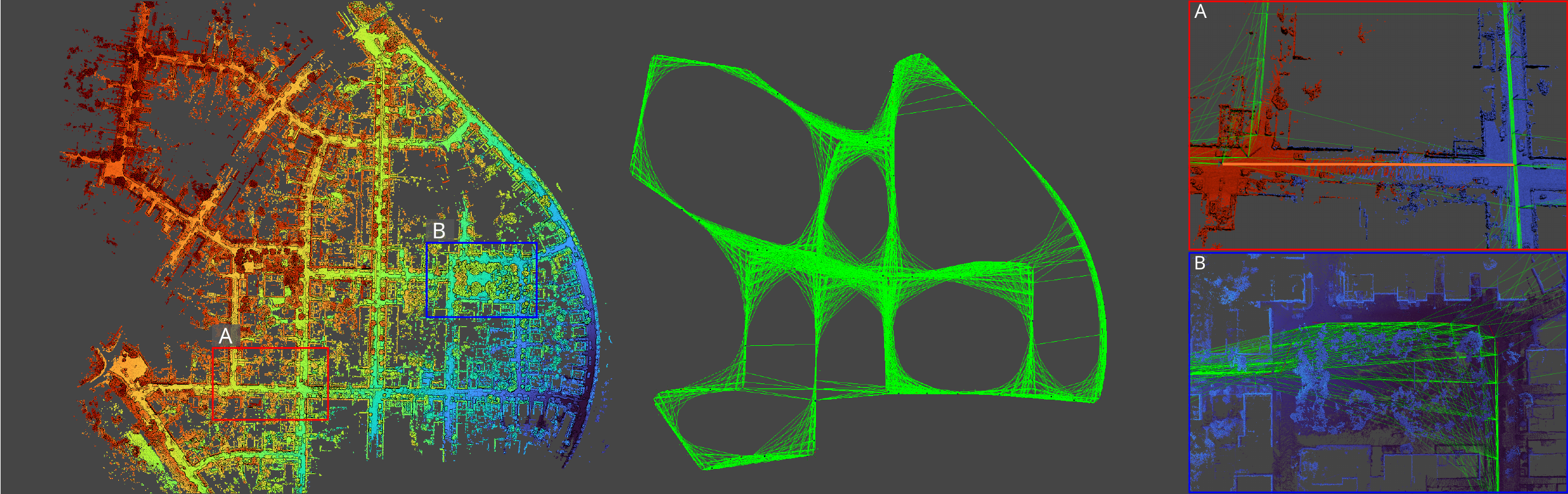
This paper presents a real-time 3D LiDAR mapping framework based on global matching cost minimization. The proposed method constructs a factor graph that directly minimizes matching costs between frames over the entire map, unlike pose graph-based approaches that minimize errors in the pose space. For real-time global matching cost minimization, we use a voxel data association-based GICP matching cost factor that is able to fully leverage GPU parallel processing. The combination of the matching cost factor and GPU computation enables constraint of the relative pose between frames with a small overlap and creation of a densely connected factor graph. The mapping process is managed based on a voxel-based overlap metric that can quickly be evaluated on a GPU. We incorporate the proposed method with an external loop detection method in order to help the voxel-based matching cost factors to avoid convergence in a local solution. The experimental result on the KITTI dataset shows that the proposed approach improves the estimation accuracy of long trajectories.
Video (Globally Consistent Mapping)
Video (LiDAR-IMU Tight Coupling)
Related Work
LiDAR-IMU Tight Coupling
VGlobally Consistent and Tightly Coupled 3D LiDAR Inertial Mapping
Kenji Koide, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno
IEEE International Conference on Robotics and Automation (ICRA2022), Philadelphia, USA, May,
2022
pdf
GPU-accelerated Scan Matching
Voxelized GICP for Fast and Accurate 3D Point Cloud Registration
Kenji Koide, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno
IEEE International Conference on Robotics and Automation (ICRA2021), Xi'an, China, May, 2021
pdf
doi
code
Parameter Tuning for Black-box LiDAR Odometry
Adaptive Hyper-Parameter Tuning for Black-box LiDAR Odometry
Kenji Koide, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2021), Prague, Czech
Republic, Sep., 2021
pdf
doi
Automatic Hyper-Parameter Tuning for Black-box LiDAR Odometry
Kenji Koide, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno
IEEE International Conference on Robotics and Automation (ICRA2021), Xi'an, China, May, 2021
pdf
doi
code
Open Source 3D LiDAR SLAM Frameworks
Interactive 3D Graph SLAM for Map Correction
Kenji Koide, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno
IEEE Robotics and Automation Letters, Vol. 6, Issue. 1, pp. 40-47, Jan., 2021
pdf
doi
code
A Portable 3D LIDAR-based System for Long-term and Wide-area People Behavior
Measurement
Kenji Koide, Jun Miura, and Emanuele Menegatti
International Journal of Advanced Robotic Systems, Vol. 16, Issue 2, pp. 1-16, 2019
pdf
doi
code