Non-overlapping RGB-D Camera Network Calibration with Monocular Visual Odometry
- Kenji Koide
- Emanuele Menegatti
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020), Oct., 2020
Abstract
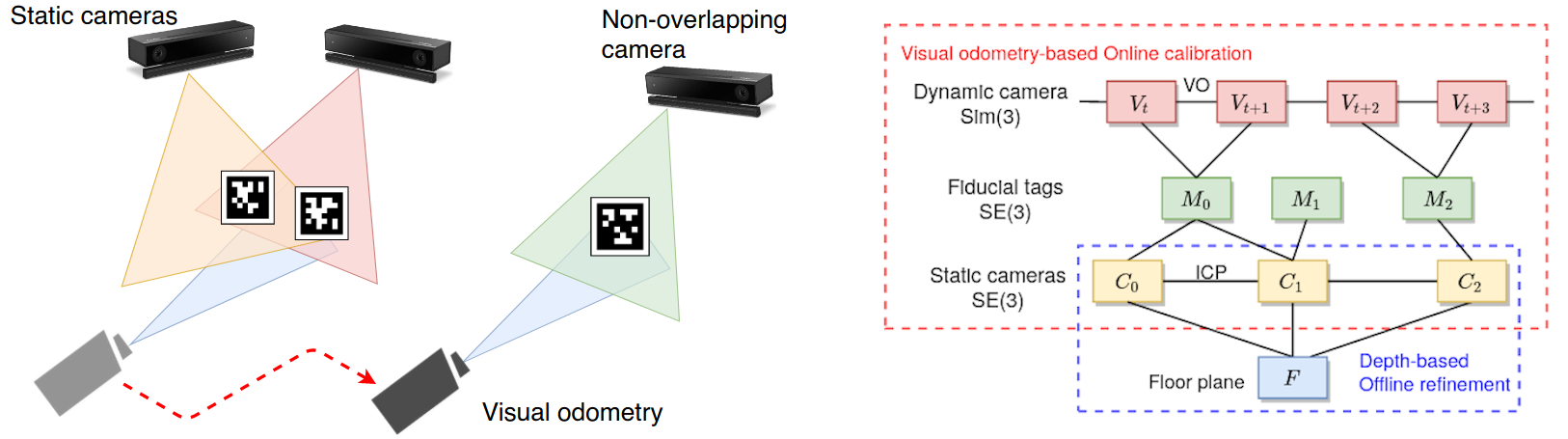
This paper describes a calibration method for RGB-D camera networks consisting of not only static overlapping, but also dynamic and non-overlapping cameras. The proposed method consists of two steps: online visual odometry-based calibration and depth image-based calibration refinement. It first estimates the transformations between overlapping cameras using fiducial tags, and bridges non-overlapping camera views through visual odometry that runs on a dynamic monocular camera. Parameters such as poses of the static cameras and tags, as well as dynamic camera trajectory, are estimated in the form of the pose graph-based online landmark SLAM. Then, depth-based ICP and floor constraints are added to the pose graph to compensate for the visual odometry error and refine the calibration result. The proposed method is validated through evaluation in simulated and real environments, and a person tracking experiment is conducted to demonstrate the data integration of static and dynamic cameras.