
山本 知生 (Tomonari YAMAMOTO)博士(情報科学)
researchmap
Google Scholar
ORCiD
Web of Science
〒305-8568 茨城県つくば市梅園1-1-1 中央2群
E-mail:yamamoto.t[at]aist.go.jp([at]を@に変更して使用してください。)
E-mail:yamamoto.t[at]aist.go.jp([at]を@に変更して使用してください。)
- 2014年3月 東北大学工学部 機械知能・航空工学科卒業
- 2016年3月 東北大学 大学院情報科学研究科 応用情報科学専攻 前期2年の過程 修了
- 2017年4月 日本学術振興会特別研究員DC2(~2019年3月)
- 2019年3月 東北大学 大学院情報科学研究科 応用情報科学専攻 後期3年の過程 修了
- 2019年3月 博士(情報科学)取得(東北大学)
- 2019年4月 産業技術総合研究所 研究員
- 2025年4月 経済産業省 出向中、現在に至る
- IEEE
- 日本機械学会
- 日本ロボット学会
- 計測自動制御学会
樹脂シートとレーザ加工を組み合わせたロボット製造法の研究(2023~)

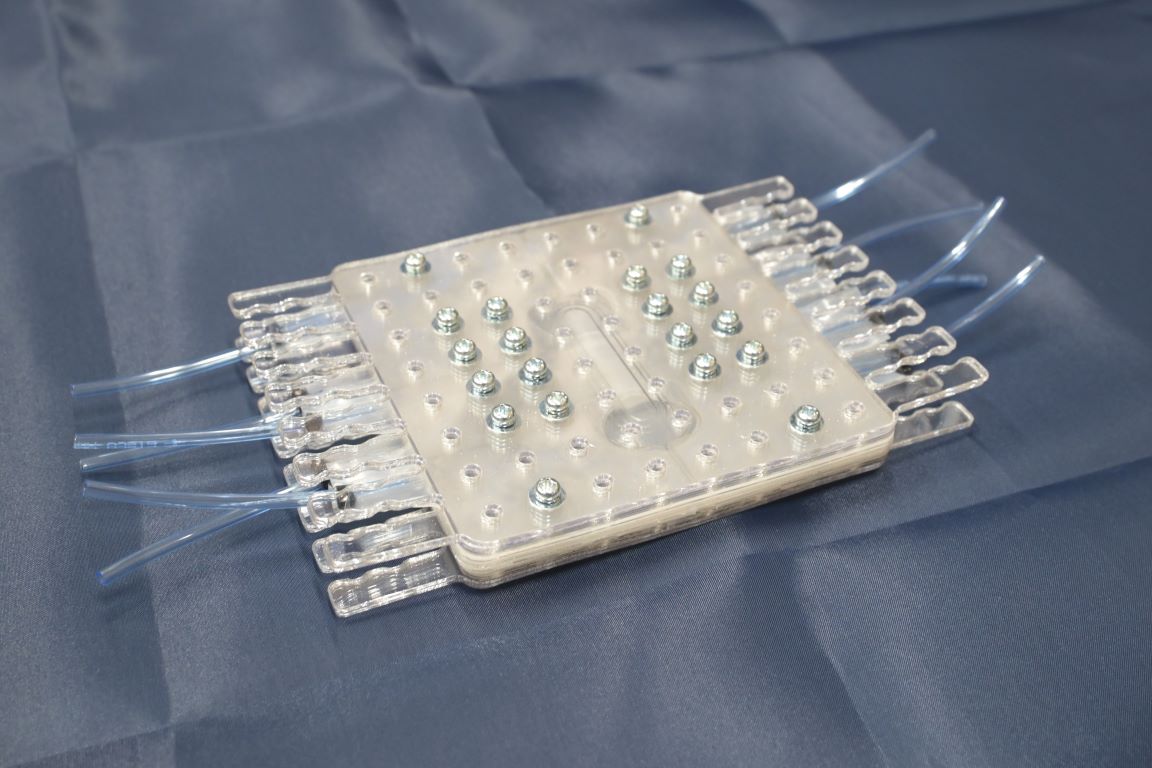
樹脂シートに対してレーザ加工によるカット・溶着加工を施すことでロボットを半自動的に製造するコンセプトを提案しています。うねうねと前進するシート状ロボットや流体制御用のバルブ、その他構造物などを製造できると考え、様々な可能性を探っています。
水の温度と圧力で動きが変わる感温アクチュエータ(2022~)
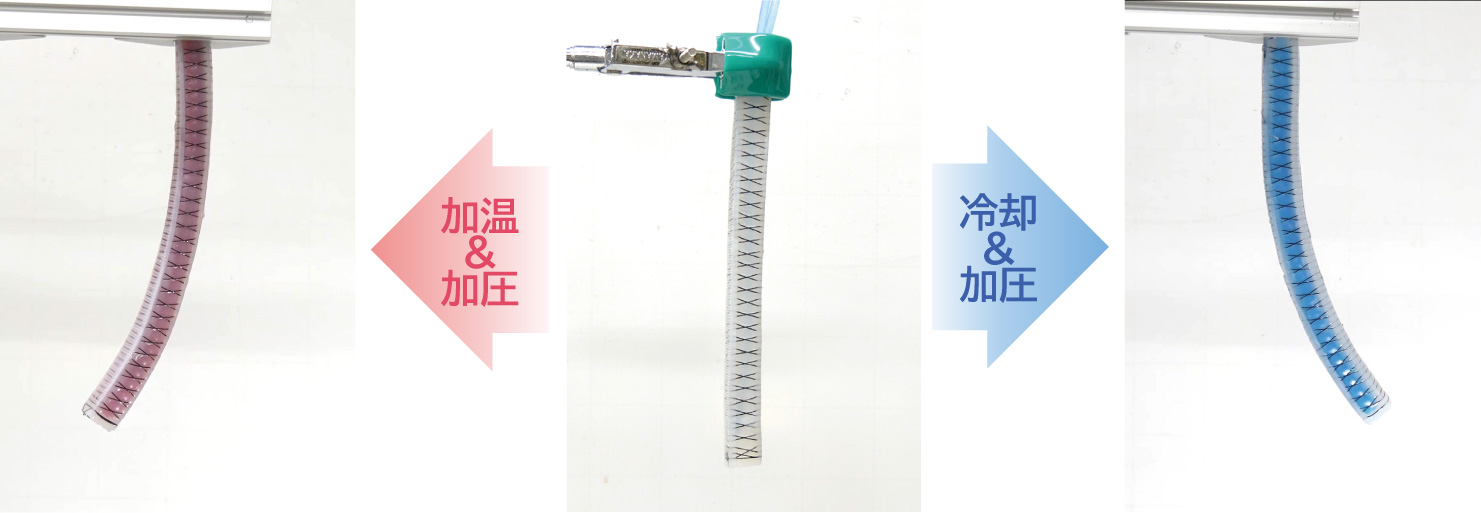
内部を流れる水の温度と圧力を変化させることで曲がる方向や曲がり方を変化させることが可能な水圧駆動のアクチュエータです。温度に依存して"伸びやすさ"が変化する素材と温度依存性の無い素材とを組み合わせることで、少ない入力で多彩な動きを実現しています。
二重気室構造の尺取り虫型細径配管内ロボット(2019~)

細径配管の点検を目的として開発している柔軟な索状ロボットです。柔軟材料により二重の空気室を構成することで、2本のエアチューブのみで尺取り虫のように前進・後退運動を生成します。内視鏡をワンタッチで取付可能で、内径30mm程度の配管内を走行可能です。
柔軟空圧アクチュエータを用いた高速小径配管内ロボット(2014~2019)

柔軟な空圧アクチュエータによって生成される直動運動を利用した新しい推進様式「スライディングインチワーム運動」により、垂直管や曲管を含む配管内を高速に走行します。配管内部の様子は先端に搭載されたカメラによって手元で観察することができます。
筆頭論文(査読付き)
論文誌
- T. Yamamoto and A. Kamimura, "Automated On-Demand Manufacturing: Laser Fabrication Concept for Soft Mechanisms," IEEE Access, vol. 13, pp. 33976-33984, Feb 2025, doi: 10.1109/ACCESS.2025.3542854.
- T. Yamamoto, M. Tanaka, and A. Kamimura, “Design, Fabrication, and Characterization of a Temperature-Sensitive Fluid-Driven Soft Actuator,” IEEE Access, vol. 12, pp. 75301-75310, May 2024, doi: 10.1109/ACCESS.2024.3405577.
- T. Yamamoto and A. Kamimura “Design and Characterization of a Hollow and Duplex-Chambered Propulsion Module for Narrow Pipe Inspection,” Journal of Mechanisms and Robotics, vol. 15, No. 2, pp. 021010, Jun. 2022, doi: 10.1115/1.4054765.
- T. Yamamoto, S. Sakama, and A. Kamimura “Pneumatic Duplex-Chambered Inchworm Mechanism for Narrow Pipes Driven by Only Two Air Supply Lines,” IEEE Robotics and Automation Letters, vol. 5, No. 4, pp. 5034-5042, Oct. 2020, doi: 10.1109/LRA.2020.3003859.
- T. Yamamoto, M. Konyo, K. Tadakuma, and S. Tadokoro, “High-speed sliding-inchworm motion mechanism with expansion-type pneumatic hollow-shaft actuators for in-pipe inspections,” Mechatronics, vol. 56, pp. 101–114, Dec. 2018, doi: 10.1016/j.mechatronics.2018.10.010.
国際会議
- T. Yamamoto, M. Konyo, K. Tadakuma, and S. Tadokoro, “A Flexible In-Pipe Robot Capable of Moving in Open Spaces via a Pneumatic Rotary Mechanism,” IFAC-PapersOnLine, vol. 50, no. 1, pp. 1050–1055, Jul. 2017, doi: 10.1016/j.ifacol.2017.08.216.
- T. Yamamoto, M. Konyo, K. Tadakuma, and S. Tadokoro, “A self-locking-type expansion mechanism to achieve high holding force and pipe-passing capability for a pneumatic in-pipe robot,” in 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, Singapore, May 2017, pp. 1900–1907, doi: 10.1109/ICRA.2017.7989221.
- T. Yamamoto, M. Konyo, and S. Tadokoro, “A high-speed locomotion mechanism using pneumatic hollow-shaft actuators for in-pipe robots,” in 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, Sep. 2015, pp. 4724–4730, doi: 10.1109/IROS.2015.7354050.
Extended Abstract
- 山本知生, 昆陽雅司, 多田隈建二郎, 田所諭, “配管内とオープンスペースを走行可能な空圧駆動型柔軟索状ロボット,” 第22回ロボティクスシンポジア, Mar. 2017, pp. 256–257.
- T. Yamamoto, M. Konyo, K. Tadakuma, and S. Tadokoro, “Rolling Resistance between Roller and Flexible Tube of Pneumatic Hollow-shaft Actuator,” in The Abstracts of the international conference on advanced mechatronics : toward evolutionary fusion of IT and mechatronics : ICAM, Dec. 2015, vol. 2015.6, pp. 269–270, doi: 10.1299/jsmeicam.2015.6.269.
共著論文(査読付き)
論文誌
- E. Takane, K. Tadakuma, T. Yamamoto, M. Konyo, and S. Tadokoro, “A mechanical approach to realize reflexive omnidirectional bending motion for pneumatic continuum robots,” ROBOMECH Journal, vol. 3, no. 1, Dec. 2016, doi: 10.1186/s40648-016-0067-x.
国際会議
- Y. Ambe et al., “Use of active scope camera in the Kumamoto Earthquake to investigate collapsed houses,” in 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, Oct. 2016, pp. 21–27, doi: 10.1109/SSRR.2016.7784272.
- E. Takane et al., “Two axes orthogonal drive transmission for omnidirectional crawler with surface contact,” in 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, Oct. 2016, pp. 378–383, doi: 10.1109/SSRR.2016.7784330.
Extended Abstract
- E. Takane et al., “Omnidirectional Curving Arm Mechanism with Passive Touch Detection,” in The Abstracts of the international conference on advanced mechatronics : toward evolutionary fusion of IT and mechatronics : ICAM, Dec. 2015, vol. 2015.6, pp. 119–120, doi: 10.1299/jsmeicam.2015.6.119.
国内学会発表
筆頭
- 山本知生, 神村明哉, “レーザ加工機を用いたソフトロボットの製作法提案と試作,” ロボティクス・メカトロニクス講演会2024講演概要集, Jun. 2024, 2A2-P01.
- 山本知生, 神村明哉, “樹脂シートのレーザ加工により製作するスタッカブルバルブの提案,” ロボティクス・メカトロニクス講演会2024講演概要集, Jun. 2024, 2P2-N08.
- 山本知生, 神村明哉, “複数のソフトアクチュエータで駆動する配管ロボットの長尺化に伴う応答性改善の検討,” 第40回日本ロボット学会学術講演会, Sep. 2022, 2A1-05.
- 山本知生, “国際会議のオンライン開催を活用した学生・若手支援イベントの実例 ~IROS2020 研究動画鑑賞会を題材として~,” 第40回日本ロボット学会学術講演会, Sep. 2022, 3G1-03.
- 山本知生, 神村明哉, “中空複室型ソフトアクチュエータで駆動する小径配管内点検ロボットの発生力特性,” ロボティクス・メカトロニクス講演会2021講演概要集, Jun. 2021, 2P2-A14, doi: 10.1299/jsmermd.2021.2P2-A14.
- 山本知生, 神村明哉, “工業用内視鏡に取り付け可能な中空複室型構造の小径配管用柔軟推進ユニットの提案,” 第21回システムインテグレーション部門講演会, Dec. 2020, pp. 1847–1851.
- 山本知生, 坂間清子, 神村明哉, “2系統の空気供給で駆動する尺取り虫型小径配管内推進機構,” ロボティクス・メカトロニクス講演会2020講演概要集, Jun. 2020, 1P2-H12, doi: 10.1299/jsmermd.2020.1P2-H12.
- 山本知生, 昆陽雅司, 多田隈建二郎, 田所諭, “静的モデルによる柔軟空圧アクチュエータの位置推定と配管ロボットの推進動作生成への応用,” ロボティクス・メカトロニクス講演会2019講演概要集, Jun. 2019, 2A1-C06, doi: 10.1299/jsmermd.2019.2A1-C06.
- 山本知生, 昆陽雅司, 多田隈建二郎, 田所諭, “空圧駆動柔軟索状ロボットの小曲率曲管通過性能向上のための管壁接触力低減構造,” ロボティクス・メカトロニクス講演会2018講演概要集, May 2018, 2A1-A06, doi: 10.1299/jsmermd.2018.2A1-A06.
- 山本知生, 昆陽雅司, 多田隈建二郎, 田所諭, “圧力と流量に基づいた中空シャフトアクチュエータの位置推定手法の検討,” 第18回システムインテグレーション部門講演会, Dec. 2017, pp. 1282–1283.
- 山本知生, 昆陽雅司, 多田隈建二郎, 田所諭, “空圧駆動型柔軟索状ロボットによる配管内とオープンスペースの走行,” ロボティクス・メカトロニクス講演会2017講演概要集, May 2017, 2P1-R02, doi: 10.1299/jsmermd.2017.2P1-R02.
- 山本知生, 昆陽雅司, 多田隈建二郎, 田所諭, “中空構造を有した小型軽量な空圧回転体,” ロボティクス・メカトロニクス講演会講演概要集, May 2017, 2P1-D01, doi: 10.1299/jsmermd.2017.2P1-D01.
- 山本知生, 昆陽雅司, 多田隈建二郎, 田所諭, “柔軟配管内走行ロボットの接触力低減動作による曲管通過性の向上,” 第17回システムインテグレーション部門講演会, Dec. 2016, pp. 490–491.
- 山本知生, 昆陽雅司, 多田隈建二郎, 田所諭, “セルフロック型配管内保持力発生機構の弾性特性を用いた印加圧力の決定,” 第34回日本ロボット学会学術講演会, Sep. 2016.
- 山本知生, 昆陽雅司, 多田隈建二郎, 田所諭, “セルフロック現象を用いた配管内ロボットのための大保持力発生機構,” ロボティクス・メカトロニクス講演会講演概要集, Jun. 2016, vol. 2016, 1A1-09a3, doi: 10.1299/jsmermd.2016.1A1-09a3.
- 山本知生, 昆陽雅司, 多田隈建二郎, 田所諭, “柔軟中空シャフトアクチュエータの弾性チューブ転がり抵抗の同定,” 第33回日本ロボット学会学術講演会, Sep. 2015.
- 山本知生, 昆陽雅司, 田所諭, “空気圧アクチュエータを用いた高速配管内推進機構の開発,” ロボティクス・メカトロニクス講演会講演概要集, Sep. 2015, doi: 10.1299/jsmermd.2015._1A1-C01_1.
共著
- 加古川篤, 山本知生, “緊急脱出のためのワイヤ駆動式伸縮機構を有する3インチ管内検査ロボット「Xbot 1」の開発,” ロボティクス・メカトロニクス講演会2023講演概要集, Jun. 2023, 1A1-B12.
- 大國嵩人, 山本知生, 加古川篤, 馬書根, “内径に応じて回転波動駆動と螺旋駆動が切り替わる管内推進機構の考察,” ロボティクス・メカトロニクス講演会2023講演概要集, Jun. 2023, 1A2-B13.
- 田中勝, 山本知生, 神村明哉, “温度・圧力変化によって運動方向を切り替え可能なソフトアクチュエータの運動解析,” 第40回日本ロボット学会学術講演会, Sep. 2022, 4K1-05.
- 小木曽里樹, 川節拓実, 山本知生, “日本学術振興会特別研究員へ応募する学生へ向けたろぼやんの取り組み,” 第40回日本ロボット学会学術講演会, Sep. 2022, 2A1-02.
- 田中勝, 山本知生, 神村明哉, “温度・圧力変化によって運動方向を切り替え可能なソフトアクチュエータの運動解析,” ロボティクス・メカトロニクス講演会2022講演概要集, Jun. 2022, 2P1-K06.
- 高根英里, 多田隈建二郎, 嵜山勢士, 山本知生, 昆陽雅司, 田所諭, “全方向面状クローラ機構 ‘Omni-Board’ -動力伝達方式の提案と横方向移動ユニットの第一次試作-,” 第16回システムインテグレーション部門講演会, Dec. 2016, pp. 1506–1509, doi: 10.1299/jsmermd.2016.1A2-08b5.
- 高根英里 et al., “面状全方向クローラ移動体 ‘Omni-Board’ - 第4報:横方向用履帯の傾き変位許容実験と全周クローラの動作実験 -,” 第34回日本ロボット学会学術講演会, Sep. 2016, pp. 2U1-04.
- 多田隈建二郎, 高根英里, 山本知生, 西田健, 昆陽雅司, 田所諭, “1自由度多変形グリッパ機構:-受動式内体積可変メカニズムの導入-,” ロボティクス・メカトロニクス講演会講演概要集, Jun. 2016, vol. 2016, pp. 1A2-08b3, doi: 10.1299/jsmermd.2016.1A2-08b3.
- 高根英里, 多田隈建二郎, 山本知生, 昆陽雅司, 田所諭, “面状全方向駆動クローラ機構,” ロボティクス・メカトロニクス講演会講演概要集, Jun. 2016, pp. 1A2-08b5, doi: 10.1299/jsmermd.2016.1A2-08b5.
- 高根英里, 多田隈建二郎, 山本知生, 昆陽雅司, 田所諭, “面状全方向クローラにおける動力伝達機構の実験的検討,” ロボティクス・メカトロニクス講演会講演概要集, Jun. 2016, 2A2-08a5, doi: 10.1299/jsmermd.2016.2A2-08a5.
- 高根英里, 山本知生, 多田隈建二郎, 昆陽雅司, 田所諭, “腕・手連続効果器における全方位反射的湾曲メカニズム,” 計測自動制御学会東北支部第300回研究集会, Feb. 2016, pp. 300–7.
- 嵜山勢士, 多田隈建二郎, 高根英里, 山本知生, 昆陽雅司, 田所諭, "全方向なじみ変形グリッパ機構," 第16回計測自動制御学会システムインテグレーション部門講演会, Dec. 2015, 2M3-3.
- 高根英里, 多田隈建二郎, 山本知生, 大野和則, 昆陽雅司, 田所諭, “全方向受動湾曲メカニズム - 接触感応式連動バルブによる受動湾曲機能 -,” 第33回日本ロボット学会学術講演会, Sep. 2015, 3K1-08.
その他文献・刊行物
専門誌
- 山本知生, "空気圧駆動型細径配管内点検ロボットの開発 ~中空複室構造のソフトアクチュエータを用いた推進力生成機構~," 油空圧技術, 日本工業出版, pp. 17-21, Feb. 2022.
書籍
- 山本知生、情野瑛、小林陽成、Muhammad Salman Al Farisi、佐藤悠司, "文部科学省博士課程教育リーディングプログラム東北大学グローバル安全学トップリーダー育成プログラム学生自主企画活動報告書2018.3 第7章 災害時の救援物資にかかる課題の調査・議論と対策の検討," 東北大学グローバル安全学トップリーダー育成プログラム, pp. 240-293, May 2018.
産業財産権(特許など)
国外特許
- 10359060(US), “Moving device and moving method of moving device,” E. Kobayashi, Y. Hirata, S. Tadokoro, T. Yamamoto, M. Konyo, K. Tadakuma.
国内特許
- 特許第7274217号, “移動装置,” 山本知生.
- 特許第7153262号, “移動装置、及び、移動装置の移動方法,” 平田康夫, 坂本哲幸, 小林英一, 田所諭, 山本知生, 昆陽雅司, 多田隈建二郎.
- 特許第7148923号, “移動装置、及び、移動装置の移動方法,” 平田康夫, 坂本哲幸, 小林英一, 田所諭, 山本知生, 昆陽雅司, 多田隈建二郎.
- 特許第6959599号, “移動装置、及び、移動装置の移動方法,” 平田康夫, 小林英一, 坂本哲幸, 田所諭, 山本知生, 昆陽雅司, 多田隈建二郎.
- 特許第6381091号, “移動装置、及び、移動装置の移動方法,” 小林英一, 平田康夫, 田所諭, 山本知生, 昆陽雅司, 多田隈建二郎.
- 特願2023-009454, “管内走行装置,” 山本知生, 加古川篤.
- 特願2016-117372, “変形装置,” 多田隈建二郎, 昆陽雅司, 田所諭, 髙根英里, 山本知生.
- 特願2016-117371, “クローラ式全方向駆動体,” 多田隈建二郎, 昆陽雅司, 田所諭, 髙根英里, 山本知生.
学会賞
- 2017年9月ロボティクスシンポジア研究奨励賞(第22回ロボティクスシンポジア「配管内とオープンスペースを走行可能な空圧駆動型柔軟索状ロボット」に対して)
- 2016年12月SI2016優秀講演賞(SI2016発表「柔軟配管内走行ロボットの接触力低減動作による曲管通過性の向上」に対して)
- 2016年6月日本機械学会若手優秀講演フェロー賞(ROBOMECH2015発表論文「空気圧アクチュエータを用いた高速配管内推進機構の開発」に対して)
- 2015年12月SI2015優秀講演賞(SI2015発表 “全方向なじみ変形グリッパ機構” に対して)
- 2015年10月IEEE Robotics and Automation Society Japan Chapter Young Award(IROS2015発表論文 “A High-Speed Locomotion Mechanism Using Pneumatic Hollow-Shaft Actuators for In-Pipe Robots” に対して)
競技会等
- 2013年7月RoboCup 2013 Eindhoven RoboCup Rescue League Innovation Award
- 2013年5月RoboCupジャパンオープン2013 レスキュー実機リーグ 優勝
- 2013年5月RoboCupジャパンオープン2013 レスキュー実機リーグ ベストインクラス モビリティ