研究内容>人を見守るデジタルヒューマン
低プライバシー侵害性・無拘束性の人間ロケーションセンサ:超音波レーダシステム
概要
低プライバシー侵害性・無拘束性の行動観察システムとして,人の位置計測を行なう超音波レーダシステムの研究開発を行っている.
人とモノの位置から,日常の人の行動ADL(Activities of Daily Living)を観察し,観察したデータを用いてEvidence-Basedな日常生活支援を行うことでQOL(Quality
Of Life)の向上を可能とするシステムの構築を目指している. 本システムは超音波を用いることで, 1)超音波のエコー現象を用いた無拘束計測機能 ,
2)超音波の距離計測を用いた3次元位置計測アルゴリズムによる低プライバシ侵害性計測機能, という日常空間において人の行動を観察するシステムに必要な機能を実現した.
超音波レーダシステム
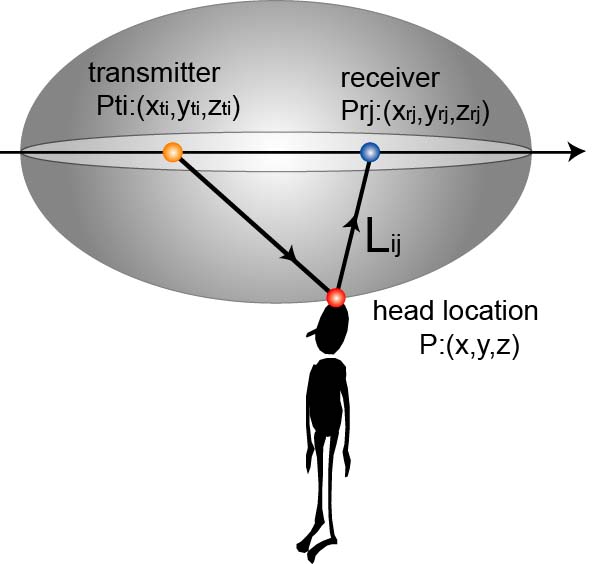
超音波レーダシステムは環境内に埋め込まれた超音波発信器・受信器を用いて人の頭部で反射する超音波を計測して,人頭部の3次元位置を計測する. 図1,図2は構築した日常観察のための超音波レーダシステムを示している.
天井部に超音波発信器117個,超音波受信器117個,計234個の超音波センサが埋め込まれており,発信器制御装置・受信器制御装置などは天井裏に設置されている.
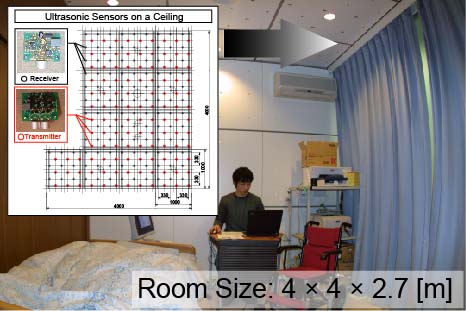
図1:Ultrasonic Sensor System
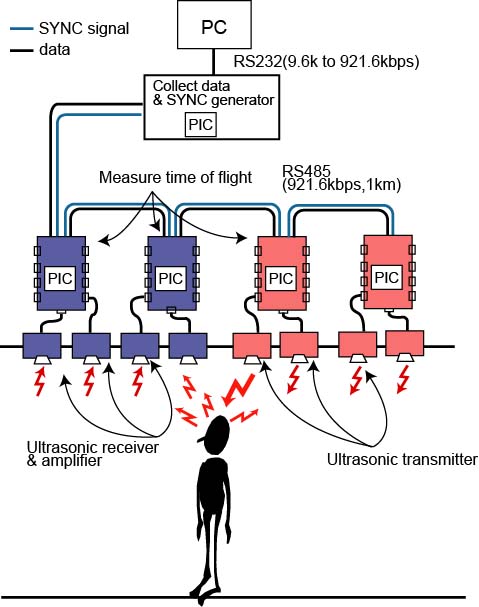
図2:System Configuration
頭部3次元位置計測原理
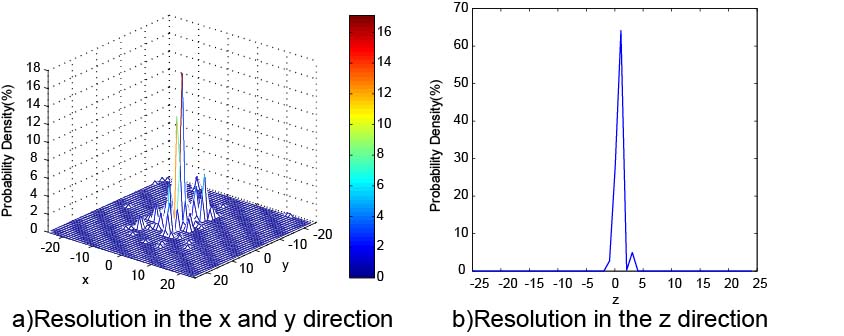
分解能と計測誤差
図は一定の位置に置いた対象物の3次元位置検出のばらつきを評価した実験の結果を表している.
この図は,一定の位置に置いた対象物の3次元位置を1000回測定することで,確率密度を計算した結果である.
x,y軸は,20×20mmごとに区切られており,縦軸はその場所の確率密度を示している.
ただし,ここでのxy平面は床平面,z軸は床法線方向である.
超音波レーダ機能による位置計測分解能は,x軸方向:128mm,y軸方向:195mm, z軸方向:111mmであることが判明した.
また,平均計測誤差は54mmであった.
計測結果
レーダ機能による人の位置測定と,タグ機能によるモノの位置計測を同時に行った結果を図5に示す. タグは車椅子に装着し,その位置計測を行った.
図中赤部がレーダ機能による人の位置及び軌跡で,白部がタグ機能によるモノ(車椅子)の位置及び軌跡である.
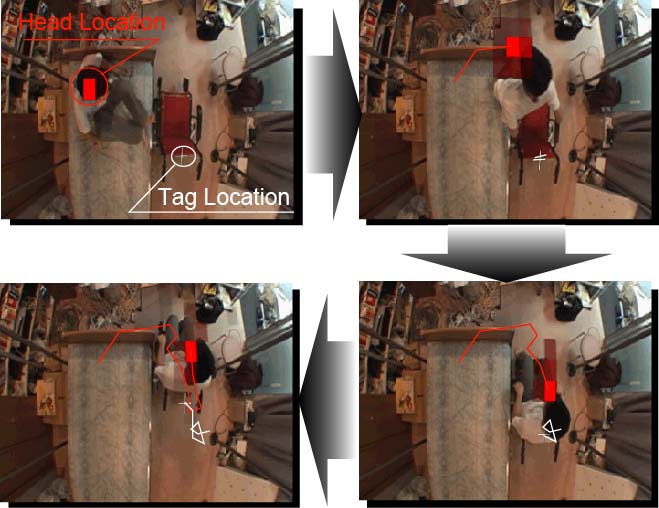
図5:Experiment by Ultrasonic Sensor System
レーダによる頭部3次元位置計測の結果と高さによる対象物の識別
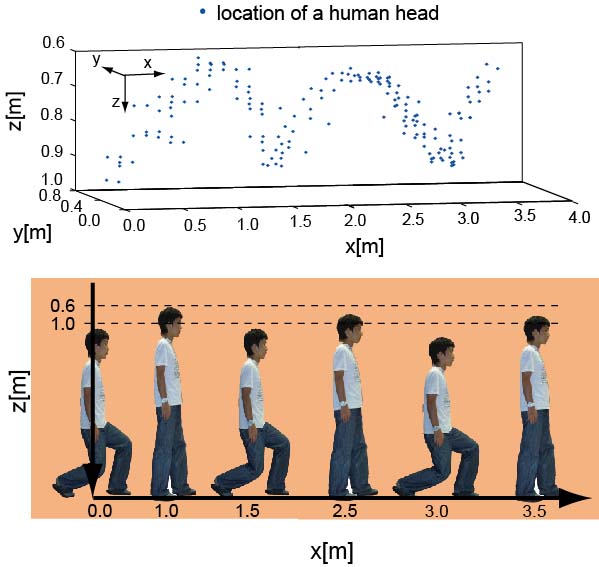
超音波レーダシステムを用いて人の頭部位置を計測した結果を図に示す.
図中上部の青点はレーダシステムが計測した人の頭部位置であり,下部は実際の人の動きである.
これより,超音波レーダシステムは人の移動軌跡が3次元で計測できていることが確認できる.
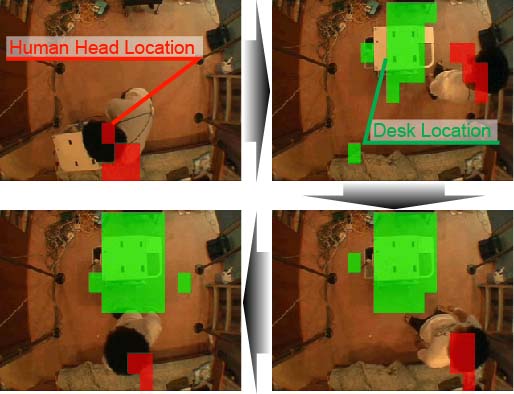
また,図は人の頭部の高さと机の高さの違いを利用して,それらの位置を計測した例である.
図中において,計測空間中で最も高く位置する物体については赤色で,次に高く位置する物体については緑色で示してある.
図より,高さの違いを利用して人の頭部位置と机の位置が計測・追跡できているのが確認できる.
これにより,本システムは,物体の高さの違いを利用た,複数物体の識別が可能であるといえる.
参考文献
- 村上真一, 堀俊夫, 西田佳史, 溝口博, "超音波タグシステムによる老人ホームの見守り支援〜高齢者のライフログを用いたエビデンスベースド介護〜,"
第23回日本ロボット学会学術講演会予稿集, pp. 3D33(1)-(4), September 2005 (慶應大)
- 村上真一, 西田佳史, 堀俊夫, 溝口博, "低プライバシ侵害性の行動観察システム 〜超音波タグ・レーダ統合システムによる人とモノの位置計測〜,"
日本機械学会 ロボティクス・メカトロニクス講演会'05講演論文集, 1A1-N-095(1)-(4), June 2005
- T. Hori, Y. Nishida, "Ultrasonic Sensors for the Elderly and Caregivers
in a Nursing Home," Proceedings of the 7th International Conference
on Enterprise Information Systems ICEIS 2005, Vo. 5, pp. 110-115, May 2005
- Y. Nishida, S. Murakami, H. Toshio, H. Mizoguchi, "Minimally Privacy-Violative
System for Locating Human by Ultrasonic Radar Embedded on Ceiling,"
in Proceedings of 2004 IEEE International Conference on Systems, Man and
Cybernetics (SMC '04), pp. 1549-1554, October 2004
- T. Hori, Y. Nishida, S. Murakami, H. Aizawa, H. Mizoguchi, "Distributed
Sensor Network for a Home for the Aged," in Proceedings of 2004 IEEE
International Conference on Systems, Man and Cybernetics (SMC '04), pp.
1577-1582, October 2004
- 村上真一, 西田佳史, 堀俊夫, 溝口博, "簡易設置型超音波レーダによる人の頭部位置発見システム," 第22回日本ロボット学会学術講演会予稿集,
1A23(1)-(2), September 2004
- 西田佳史, 村上真一, 堀俊夫, 溝口博, "低プライバシー侵害性の人間位置検出システム〜天井超音波レーダを用いた頭部位置計測手法〜,"
日本機械学会 ロボティクス・メカトロニクス講演会'04講演論文集, 1A1-H-47(1)-(4), June 2004
 , j番目の受信器を
, j番目の受信器を ,
超音波の伝播距離を
,
超音波の伝播距離を とすると,
とすると,