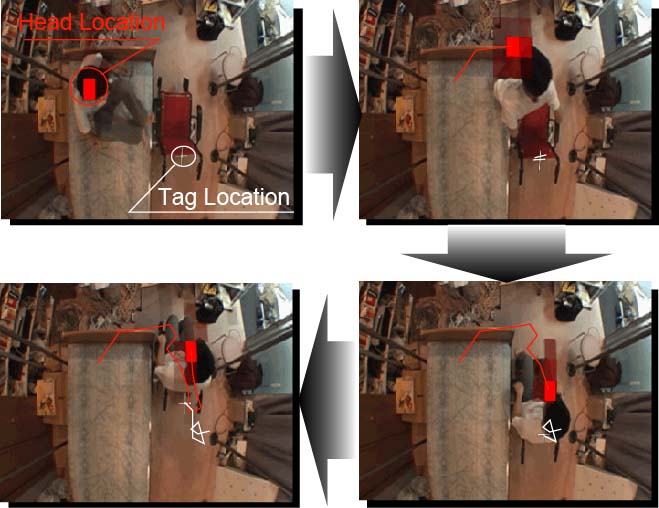
Figure 5 shows the results of an experiment in which the radar and tag functions
were used to simultaneously track a person and an object. The tag was attached
to a wheelchair and used to track its location. The red markings in the photographs
show the location and path of the person as determined by the radar function,
while the white markings show the location and path of the object (wheelchair)
as determined by the tag function.
Application in Nursing Homes: Proposal for an Evidence-Based
Nursing Support System that Utilizes Behavior Pattern Awareness
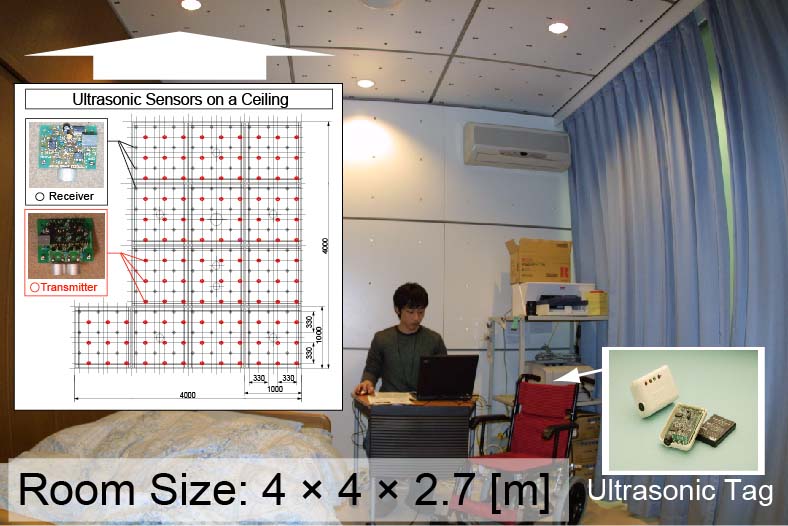
We installed this system in a nursing home in Akishima City, Tokyo, and monitored
the behavior of a patient over a period of 46 days. Figure 6 shows the floor
plan of observation space used in the nursing home. The path in the diagram
is one of the paths made by movement of the subject’s wheelchair.
Information about location was used to monitor behavior, and behavior analysis
was performed. One such example is shown in figure 7. The horizontal axis
represents the passage of time over one day (0 o’clock to 23 o’clock). The
red bar graph shows the number of times the subject left the bed area over
the 46 days

,
and the blue bar graph shows the number of times the patient left the bed
area and entered the toilet

.
The numbers show the probability of going to the toilet
.
From the graph we can see that when the subject leaves the bed area at around
6 o’clock, the probability that he will enter the toilet is approximately
30 percent. In contrast, when the subject leaves the bed area at around
8 o’clock, the probability that he/she will enter the toilet is approximately
90 percent. From these observations we can predict that this patient is
more likely to require assistance going to the toilet (assistance in getting
to the toilet and moving from wheelchair to toilet seat) when he leaves
the bed area around 8 o’clock than when he/she leaves the bed area around
6 o’clock. This information could be used to facilitate nursing by giving
caregivers a better idea of when the patient might need assistance going
to the toilet.
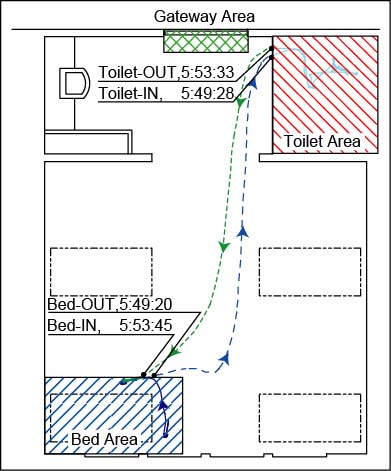
Figure 6:Tag Trajectory.
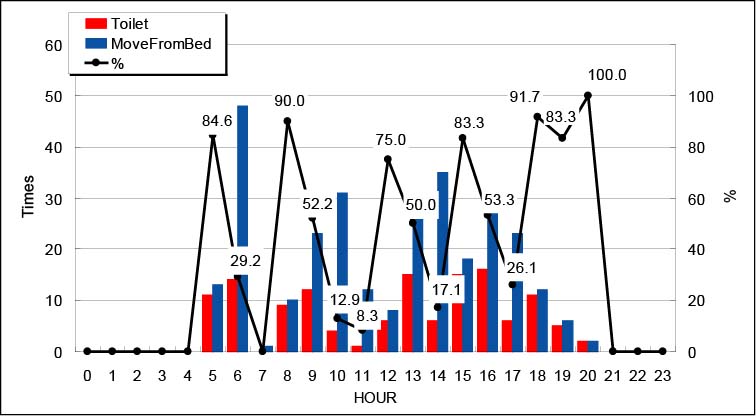
Figure 7: Number of trips to the toilet and the
number of times the patient got out of bed over 24 hours, as well as the circumstantial
probability that the patient will go to the toilet when they get out of bed