
A dexterous micro manipulation system is developed for application in micro surgery, assembling micro machine, and manipulating cells. The micro manipulation system is used to assist a human operator handling micro objects. By using this system the operator can manipulate micro meter scale objects.
In case of micro manipulation, high accuracy and multi-degree motion is necessary. The parallel mechanism is applied to a micro hand. Also, we have proposed a concept of a two-finger micro hand. A structure of the two-finger micro hand is strongly related to its effective workspace, or the common workspace of two fingers. Therefore we have designed the structure based on chopsticks motion to be suitable for a two-finger micro hand, and made a prototype. The workspace of finger is 586 × 586 × 52 microns area. Its positioning resolution is less than 0.1 micron. Three degrees motion can be controlled.
By using this micro hand, it can be achieved to manipulate a microscopic objects which is glass ball having size of 2 microns, white blood cell of human having size of 10 microns, etc.
Two
fingered micro hand
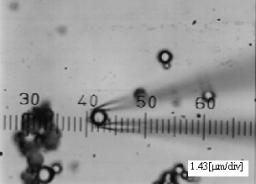
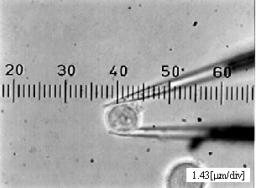
Manipulation of glass ball Manipulation of white blood cell
Paper
Pasi Ojala, Tatsuo Arai, Tamio Tanikawa, Heikki Koivo: "Motion Optimization and Control of the 7 D.O.F. Micro Manipulator", Proc. Scandinavian Symposium on Robotics, pp. 132-136, October 4-6,1994
Pasi Ojala, Tatsuo Arai, Tamio Tanikawa: "Kinematic Analysis and Motion Control of a Redundant Micro Manipulator" , Proc. 2nd Japan-France Congress on Mechatronics, pp.473-476, Nov. 1-3, 1994
Tamio Tanikawa, Tatsuo Arai, Masami Saeki: "Two-Finger Micro Hand", Proc. IEEE International Conference on Robotics and Automation, pp.1674-1679, May 21-27, 1995
Tamio Tanikawa, Tatsuo Arai, Takanori Masuda: "Development of Micro Manipulation System with Two-Finger Micro Hand", Proc. IEEE/RSJ International Conference on Intelligent Robotics and Systems, pp. 850-855, Nov. 4-8, 1996
Tatsuo Arai, Jacques M. Herve, Tamio Tanikawa: "Development of 3 DOF Micro Finger", Proc. IEEE/RSJ International Conference on Intelligent Robotics and Systems, pp. 981-987, Nov. 4-8, 1996
Tamio Tanikawa, Tatsuo Arai: "Design of Two-Fingered Micro Hand and Its Application to Micro Manipulation," Journal of the Robotics Society of Japan, Vol.15, No. 2, pp. 284-289,(1997), (Japanese)
Tatsuo Arai, Tamio Tanikawa, Rene Larsonneur: "Mechanism Design and Motion Control of Finger Module for Micro Hand," Journal of the Robotics Society of Japan, Vol.15, No. 3, pp. 402-407,(1997), (Japanese)
Tamio Tanikawa, Tatsuo Arai, Yoshiyuki Hashimoto: “Development of Vision System for Two-fingered Micro Manipulation,” Proc. IEEE/RSJ International Conference on Intelligent Robotics and Systems, pp. 1051-1056, Sept. 7-11, 1997
Tatsuo Arai, Tamio Tanikawa: “Micro Manipulation Using Two-Finger Hand,” Proc. Workshop on Working in the Micro- and Nano-Worlds: Systems to Enable the Manipulation and Machining of Micro-Objects(Grenoble), pp.12-19, Sept. 7-11, 1997
Tamio Tanikawa, Tatsuo Arai:"Development of Master Device for Two-Fingered Micro Hand and Operation Strategy," Journal of the Robotics Society of Japan, Vol. 16, No. 4, pp. 109-115,(1998), (Japanese)
Tamio Tanikawa, Yoshiyuki Hashimoto, Tatsuo Arai: “Micro Drops for Adhesive Bonding for Micro Assemblies and Making a 3-D Structure “Micro Scarecrow”,” Proc. IEEE/RSJ International Conference on Intelligent Robotics and Systems, pp. 776-781, Oct. 13-17, 1998
Tamio Tanikawa, Tatsuo Arai, “Development of a Micro-Manipulation System Having a Two-Fingered Micro-Hand,” IEEE Transaction on Robotics and Automation, vol.15, No. 1, pp. 152 -162, Feb., 1999
James Nielsen, Tamio Tanikawa, Tatsuo Arai: “Design and Analysis of a 3-DOF Micromanipulator,” Proc. of the 1999 IEEE International Conference on Robotics and Automation, pp. 2183-2188, May 10-15, 1999
Tamio Tanikawa, Tatsuo Arai, Noriho Koyachi: “Development of Small-sized 3 DOF Finger Module in Micro Hand for Micro Manipulation,” Proc. IEEE/RSJ International Conference on Intelligent Robotics and Systems, pp. 876-881, Oct. 17-21, 1999
Yoshiki Ohya, Tatsuo Arai, Yasushi Mae, Kenji Inoue, Tamio Tanikawa: “Development of 3-DOF Finger Module for Micro Manipulation,” Proc. IEEE/RSJ International Conference on Intelligent Robotics and Systems, pp. 894-899, Oct. 17-21, 1999
Tamio Tanikawa, Hitoshi Maekawa, Kenji Kaneko, Makoto Tanaka: “MICRO ARM FOR FEEDING AND MICRO HAND FOR ASSEMBLY ON MICRO FACTORY IN MECHANICAL ENGINEERING LABORATORY (MEL)”, Proceedings of 2000 Japan-USA Symposium on Flexible Automation, 2000JUSFA-13034, July 23-26, 2000
Tamio Tanikawa, Hitoshi Maekawa, Kenji Kaneko, Makoto Tanaka: “Micro Arm for Transfer and Micro Hand for Assembly on Machining Microfactory”, Proceeding of 2nd International Workshop on Microfactories, pp.155 –158, Oct. 9-10, 2000
Tamio Tanikawa, Masashi Kawai, Noriho Koyachi, Tatsuo Arai, Takayuki Ide, Shinji Kaneko, Ryo Ohta, Takeshi Hirose: “Force Control System for Autonomous Micro Manipulation”, Proc. of the 2001 IEEE International Conference on Robotics and Automation, pp. 610-615, May 21-26, 2001