![]()
研究分野と重点研究
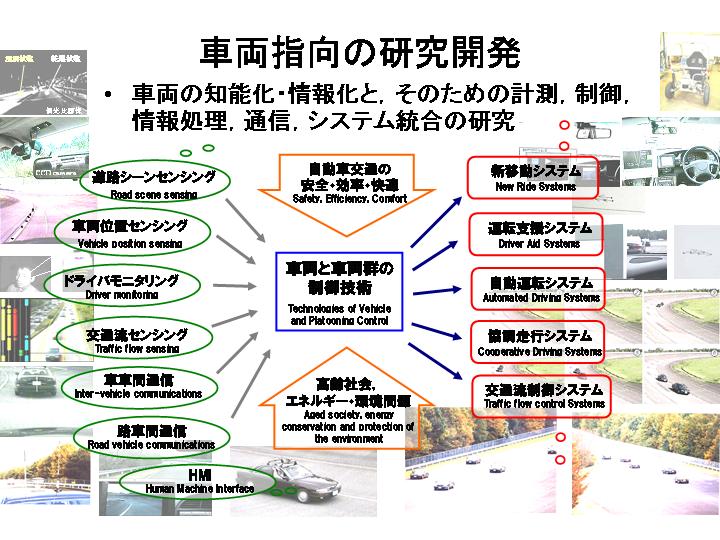
前身である機械技術研究所の知識工学研究室の発足以来、ITS(Intelligent Transportation Systems:高度道路交通システム),中でも,自動運転に代表される先進車両制御安全システム (AVCSS:Advanced Vehicle Control Safety Systems)をはじめとする, 移動機械の知能化,情報化とそのための計測,制御,情報処理,通信, システム統合の研究をすすめています. 特に,ITS研究グループではドライバ・センタード・アダプティブ・インテリジェント・ビークル(Driver-centered Adaptive Intelligent Vehicle)に関する研究として,ヒューマンドライバによる運転と自動運転システムによる運転の二重系を基本とした,高齢者,初心者に親切な運転支援システムに関する研究などを重点的に行っています.
これまでの研究テーマ
インテリジェントビークル[AVCSS]
自動車の自動運転システム(知能自動車) ,非接触連結車両 ,サインポストを用いた位置・方位測定,光切断法を用いた障害物検出,複数移動機械の協調のための対話,省エネルギーのためのITS技術,人との柔軟な関わりを持つ機械システムの動的な自律制御,ドライバ挙動の計測と定量化など
自動車交通の情報システム[ATMS/ATIS]
自動車総合管制システムCACS(大型プロジェクト) ,光電デバイスによる交通流の計測, 自動車交通の知能化と交通流解析など
現在の研究
いままでの実績と成果を発展させ,現在では,driver-adaptiveな,traffic-adaptiveな,そしてenvironment-adaptiveな運転支援・自動運転技術の研究を進めています.これらの意味するところは,
driver-adaptive:あらゆるドライバに適応して親切でお節介でないtraffic-adaptive:交通流に適応して流れを乱さない
environment-adaptive:環境に適応して環境負荷を低減する
です.場合によっては運転操作に介入することも含めて,個々のドライバには安全運転支援を行い,交通流の観点からは道路のスループットを向上させるように走行支援を行う運転支援・自動運転システムを目的としています.そのために以下のような技術を使います.
センシング:自車位置(DGPS,電波マーカ),レーン(マシンビジョン),周辺車両・障害物(レーザレーダ,ミリ波レーダ),交通流(マシンビジョン)制御:ラテラル制御(操舵),ロンジチュージナル制御(速度,車間距離)
通信:車車間通信(5.8GHz,DSRC)
高齢ドライバを含むドライバ適応型支援システム
超小型電気自動車の知能化研究(自動運転,エスコートドライブ,運転支援) など