産総研におけるITS研究の概要
![]()
産業技術総合研究所の前身である機械技術研究所では1960年代初めから自動車の自動運転の研究を行っていました.1960年代に研究した自動運転システムでは,運転コースに沿って埋めた電線に電流を流し,電線に沿って車が走るようにハンドルをコントロールしました.この方式で1967年には時速100kmで乗用車の自動運転を行いました.この方式では道路に大がかりな設備が必要となります.機械技術研究所は,このような設備を必要としない,テレビカメラで運転コースを見つける自動運転システムを1970年代に研究し,1978年に時速30kmで自動運転を行いました.これは世界で初めてのシステムでした.
このような自動運転の研究に加えて,1970年代に行われた当時の工業技術院大型プロジェクトである動的経路誘導システム「自動車総合管制システム(CACS,Comprehensive Automobile Traffic Control System)」にも参画しました.以後,特に先進車両制御安全システム(AVCSS,Advanced Vehicle Control and Safety Systems)の分野でITSに関する研究を進めてきました.
2000年には,それまでの研究の集大成として,小さな車間距離で何台かの自動運転車を走らせ,車線変更も柔軟に行うことができるような協調走行の研究などを行っています.協調走行によって事故を防ぐだけでなく渋滞も防ぐことができます.その手本としたのは,渡り鳥の雁がつくる雁行と呼ばれる形や,イルカが仲間と会話しながら泳ぐ姿です.協調走行のために,各車は,テレビカメラ,レーザレーダ,ミリ波レーダ,DGPS,車同士で通信を行う車車間通信装置などを装備しています.
2008年から2013年にはNEDOのエネルギーITS推進事業における大型トラックの自動運転・隊列走行の研究開発に携わり,他に企業や大学,研究機関など14機関とともに,4台のトラックを用いた車間距離4m,車速80km/hの隊列走行を成功させています.
現在,産業技術総合研究所 知能システム研究部門 フィールドロボティクス研究グループにおいても,ITS研究として,様々な移動体の知能化やネットワーク化などの研究をすすめています.

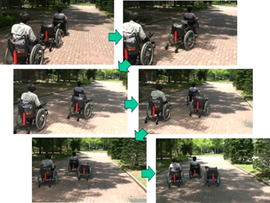
パーソナルモビリティのフォーメーション制御

車間距離4m,車速80km/hの隊列走行

小型EVによる様々な連結方式での走行