
要旨
ディペンダブルリフトは起立困難や歩行困難な要介護者をターゲットとして産業技術総合研究所が研究開発している電動式の介護リフトです。このリフトの目的はトイレに介護が必要な方を一人で自立してトイレに行けるようにすることです。骨盤を支持する構造を持つことが最大の特徴です。

背景/問題
高齢者のトイレの介護は負担が大きいですが、多少の残存能力と特殊なリフトがあれば、介護が必要なくなり一人でトイレに行けるようになることが期待できます。
トイレの介護は介護者にとっても被介護者にとっても負担が大きい場面です。老人ホームの介護職員にとって排泄の対応は二番目に精神的負担の大きな仕事です。(一番目は認知症の方の言動への対応など、高齢者の行動上の問題への対応[1]。)在宅介護では排泄への対応に最も多くの方が苦労を感じています[2]。施設職員や家族に排泄の介護をしてもらう被介護者側の精神的な負担も相当なものになっていると想像できます。
高齢者が要介護になる原因の約50%は脳血管疾患か運動器疾患によって起こる身体障がいです[3]。身体障がいが原因で要介護になった方で比較的軽度の方はリフトに体重を支えてもらうだけで再び自立してトイレに行けるようになるかもしれません。しかし、本人が一人だけで使えてトイレの動作を妨げないような介護リフトはこれまでありませんでした。
結論/ソリューション
搭乗者の胸骨と骨盤を支持する仕組みの介護リフト「ディペンダブルリフト」を考案することで解決しました。
胸骨の周辺を支持する介護リフトは以前からありましたが、新しいリフトは胸骨に加えて骨盤を支持する仕組みにしました。この2か所を体の前面から支持することにより、苦しさがなく、固定ベルトのような固定具を必要とせず、さらに搭乗者の股関節から足先までの部位に干渉せずに、搭乗者の全体重を支持して持ち上げることが可能になりました。
(動画)ディペンダブルリフトのデモンストレーション(約13MB)
映像からは分かりづらいが搭乗者は全体重をリフトに預けている。着座姿勢から起立してトイレに行って元居たところに戻るまでの一連の動作を問題なく行えることが分かる。ただし、トイレのドアの開閉と手洗い(または手の清拭)の動作は現場の状況に依存するためにこのデモンストレーションには含まれていない。臀部の温水洗浄と水滴の清拭の動作は省略している。
これまで起立困難や歩行困難でトイレに介護が必要だった人は、この電動リフトを使うことで座った姿勢から誰の手助けもなく立ち上がることができます。車輪があるので乗ったまま自分で漕いで進むことができて、目的の場所に座ることができるようになります。ズボンや下着の着脱もリフトに妨げられずに自分でできます。
いま要介護の状態にある方に、座位姿勢を保持する能力、台車を漕いで動かす力、服を着脱する力、が残っていれば、この新しいリフトを使ってトイレの一連の動作を自分でできるようになることが期待できます。
付記/補足説明
この研究成果の特筆すべき点や研究実施の詳細に関して、以下を補足して説明します。
- 骨盤を支持することの先進性について
- 搭乗中の身体の安定性について
- 未解決の課題について
骨盤を支持することの先進性について
現在の介護用具にも、股下を支える歩行支援器や胴体と脚部を同時に支える立上がり支援リフトなどがあります。しかし、それらの介護用具の支持ポイントではトイレの動作を妨げてしまいます。一人で介護リフトに頼ってトイレに行くには股関節から下に支えがあってはいけません。そのような介護リフトは前例がないので新しく考え出す必要がありました。
腹ばいになって乗るリフトを作ればいい、という考えは、おそらく半分正解ですが半分不正解です。近くにテーブルがあれば簡単に試せますが、何かに腹ばいに乗って体重を預けてみると想像をはるかに超える苦しさに息が詰まります。骨格がないところに体重をかけるのは避けるべきです。そこでこの研究では、腹の付近にある唯一の骨格、つまり骨盤に腹側からアプローチできないか検討し、骨盤と胸骨をベルト状の支持部材で支持する構造を発明しました。このアイデアは特許を受けました。
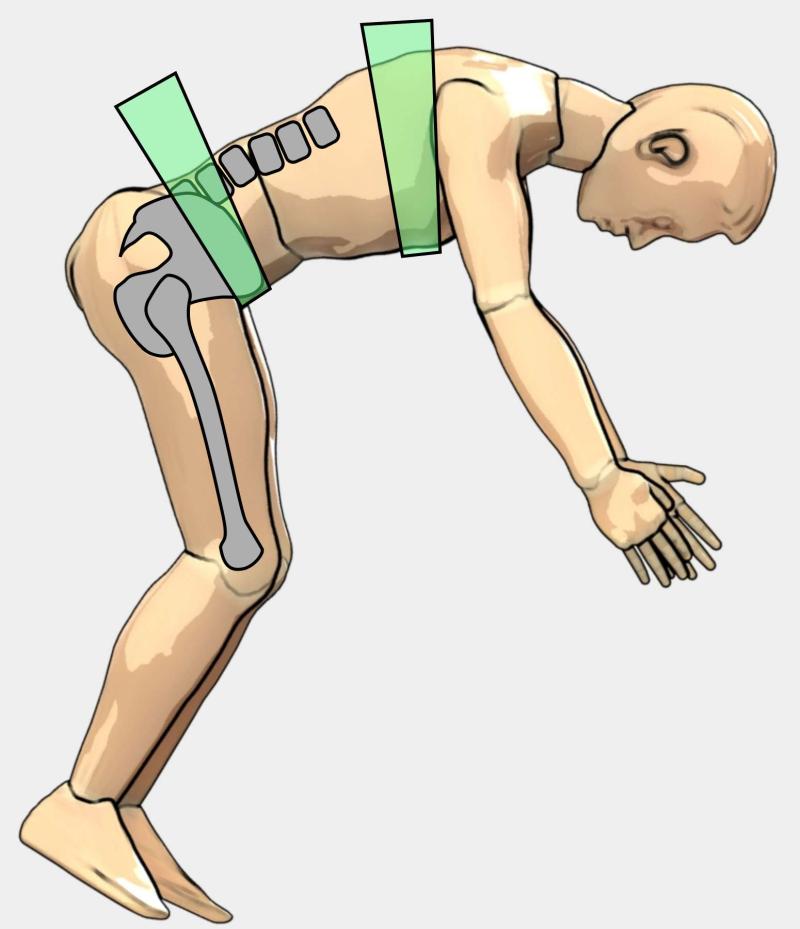
(イラスト)胸骨と骨盤を支持する人体支持方法の原理(参考文献※1より引用)
この図で示したように新しい原理では搭乗者の胸骨と骨盤を2つのベルト状の支持部材で支持している。腹部の支持部材が骨盤に当たる場所は両手を腰に当てるポーズをした時にちょうど手の下に来る硬い骨の突起部分。腸骨稜と呼ばれる。胸部の支持部材が当たる所は胸骨のほかに肋骨も含まれるので正確にいうと胸郭前部。
搭乗中の身体の安定性について
技術が安全であることは実用化するうえで重要です。胸骨と骨盤を支持する利点のひとつは息苦しくないことですが、もうひとつは、その二つの骨の間に人体の重心点があることです。
人体の重心点はだいたいヘソの付近にあるので、ディペンダブルリフトに搭乗している間は常にその重心点が2点の支持点に挟まれていることになります。これによって搭乗者の体は力学的に安定します。つまり、搭乗者は完全に脱力しても、万が一失神したとしても、転落することなく安全にリフトに乗っていられます。
下の動画は両足を足ホルダーに引っかけて2つの支持部材だけで空中に浮いているところです。足はぶらぶらさせていて力を入れていません。搭乗者の体がよく安定してリフトに乗っていることがわかります。
(動画)搭乗者の搭乗安定性のデモンストレーション(約4.4MB)
不自由のある足を保持するための足ホルダーを使って両足を吊り上げたデモンストレーション。搭乗者は胸骨と骨盤の2つの支持部材だけで空中に浮きあがっている。搭乗者が動いても体がリフト上で安定して余裕があることが見て取れる。なお、搭乗者は膝関節と股関節を脱力させていて足ホルダーの支持力を胴体部分に伝達させていない。このデモンストレーションの搭乗方法は正常な使用ではないので念のため。
未解決の課題について
現在未解決の主な研究課題は以下です。
- 機体が大きい ― 現在の実験機は前後長が80cm以上あるので使うトイレを選びます。
- 機体が重い ― 現在の実験機は重さが50kg以上あるので漕いで進むのが少々重いです。
- 骨盤をリフトに合わせるのに練習が必要 ― 初めて乗る方は骨盤で乗れずに苦しさを感じることがあります。
- 関節変形(特に円背)の適用範囲が不明 ― 関節変形がある程度以上進んだ方は使えない可能性があります。
- 衛生管理の方法が未定 ― ベルトなど一部素材に織物を使っていますがトイレでは被汚染性が高いと考えられます。
研究所の中で研究できることには限りがありますので、今後は研究のパートナーを見つけて研究を進めてまいります。
資料・データ
〇 実験機「ディペンダブルリフト」3号機のスペック
デモンストレーションの映像で使用している実験機です。初代から数えて3代目の機体です。代表的なスペックは以下です。
- 重量は52kg、全幅は56cm、台車部分の全長は82cm(搭乗部が前後にはみ出します)
- 耐荷重は100kgで強度計算(搭乗者の最大体重を80kgと想定しました)
- 昇降アクチュエータはTiMOTION社製の医療用リニアアクチュエーターTA37 1本
- 前輪は日乃本錠前社製の回転ロック付きスイングキャスターRBS-ISP100A 2輪
- 前輪の回転ロックのワイヤーをソレノイド2対4本で駆動
- 電源は25.2Vリチウムイオンバッテリー
- 操作インタフェースは昇降レバー(ハンドル部)、ブレーキスイッチ(モーメンタリ式、ハンドル部と搭乗部)、LEDブレーキランプ(各スイッチ内臓)、電源スイッチ、パイロットランプ



〇 片麻痺を想定した足ホルダー使用例の動画
(動画)片麻痺を想定した足ホルダーの使用例(約2.5MB)
左側に麻痺がある場合を想定して、不自由のある左手と左足をリフトで保持しつつ、右手と右足だけでリフトを操作するデモンストレーション。片麻痺、または一側性(片側)の骨折や関節疾患といった運動器疾患に対応するために、このリフトには動かせない足を保持するための足ホルダーを装備した。リフトの操作インタフェースは左右対称に設置したのでどちらの手でも片手で操作が可能。リフトは車輪で軽く動くので片足で移動できる。デモンストレーションでは足ホルダーに簡単に足を入れたが実際には手間がかかるはずである。反省点としては、実験機の全輪がスイングキャスターなので片足で押すと横流れしやすく、台車前部中央付近に旋回軸となる固定輪を付けた方がいいかもしれない。
〇 ディペンダブルリフト2号機のデモンストレーション動画
(動画)実験機「ディペンダブルリフト」2号機のデモンストレーション (2021年)(約5.8MB)
前モデル(2号機)を使った古いデモンストレーション動画。2021年の学会発表で使用。起立のシーンを見せているが着座のシーンを撮影していなかったため学会では「着座はできるのか?」という基本的な質問を受けることになった。搭乗後に変な姿勢をしている場面は安定性のデモンストレーションなのだが、伝わりにくいようで変な動きをしてる印象を与えるようだった。ただし、搭乗者が最初に支持部材のベルトに乗って持ち上げられていく雰囲気は最新の動画よりこちらの動画の方が直感的に分かりやすいかもしれない。
文末脚注
1 國定美香, "介護老人福祉施設の介護業務における介護労働時間とその負担度と達成度の関連性に関する研究", 日本保健福祉学会誌, 17.1, pp. 1-8, 2011より。介護職員209人に対する介護業務の負担のアンケート調査では「行動上の問題」が5段階評価の平均値として最大の3.2であり、次いで「排泄」が2.9だった。
2 内閣府政府広報室, "「介護ロボットに関する特別世論調査」の概要", < https://survey.gov-online. go.jp/tokubetu/h25/h25-kaigo.pdf >より。全国の介護経験者にアンケート調査して介護で苦労した場面を尋ねたところ「排泄(排泄時の付き添いやおむつの交換)」は最も多い62.5%の方が挙げた。
3 平成 2019年厚生労働省, "国民生活基礎調査の概況" より。高齢者が要介護者になる主要な原因は、割合の上位から認知症が24.3%、脳血管疾患(脳卒中)が19.2%、運動器疾患が30.3%(高齢による衰弱が11.4%、骨折・転倒が12.0%、関節疾患が6.9%)だった。
参考文献
■ 尾暮 拓也, 藤原 清司, 人体シミュレータによるロボット介護機器の安全性の設計と検証-移乗支援機器の概念モデル「ディペンダブルリフト」を例題として-, 第33回日本ロボット学会学術講演会予稿集, ROMBUNNO.3G1-06, 2015.
■ 尾暮 拓也, 中坊 嘉宏, 骨盤を支持する新方式の起立歩行支援リフト, LIFE2020-2021講演論文集, pp. 321-324, 2021.
■ 尾暮 拓也, 中坊 嘉宏, 骨盤支持式の立ち上がりリフト「ディペンダブルリフト」の開発, LIFE2022講演予稿集, pp. 670-673, 2022.(※1)
■ 特許6441149号, 移乗支援のための体幹支持装置, 国立研究開発法人産業技術総合研究所, 2015年出願, 2018年登録.
連絡先
〇 主任研究員 尾暮拓也
mail: <click here> | 〒305-8568 茨城県つくば市梅園1-1-1 つくば中央第2事業所
国立研究開発法人 産業技術総合研究所 インダストリアルCPS研究センター ディペンダブルシステム研究チーム