|
 Image Capture by Video4Linux - Why
don't you start computer vision research ?
Image Capture by Video4Linux - Why
don't you start computer vision research ?
Capturing image is the first step to construct a vision system.
There are many ways to capture image, e.g., using video capture
device for PCI bus, USB and IEEE1394 etc. I think video input
is still standard, I show the overview of image capture using
capture device and Video4Linux
(V4L) here. You can download a sample program. Using the program,
you can start video processing fairly easily. I borrow V4L that
is created by sincere efforts of many people to make this page. I
really appreciate it.
| 【Things
you need】
|
|
Things you need to start image capture
using V4L are
|
|
PC with Linux
|
|
Capture device with Bt848
or Bt878 (Bt8x8 is a capture chip)
|
|
Video camera or player
|
|
|
|
【Equipment I
used】
|
|
To choose equipment sometime
makes us confuse. I used low cost capture
device and video camera you may find in
your home.
|
|
PC:Pentium850MHz,Memory512MB、Linux:
Vine Linux 2.1CR
|
|
Capture device: IO-DATA
GV-VCP2M/PCI
|
|
Video camera:Sony HandyCam
DCR-PC100
|
|
The performance of PC influences
computational speed, but older PC with less
memory can be used. Above capture device
may not be available out of Japan, but you
can use any capture device with Bt848 or
Bt878. You may find devices from the sites
in the last of this page. The cost may 50
USD
to 100 USD. Every video camera with video
output can be used. If you don't have it
you can use video or DVD player (like
PlayStation 2), but you can process only
recorded materials.
|
|
|
【Installation of device
driver】
|
|
After you install capture device
into PCI bus, device driver controlling the
capture device should be installed. An
example of common procedure is as follows:
|
|
(1) Find driver modules: i2c.o,
videodev.o, bttv.o. You may
find them in /lib/modules/2.2.x/mics(2.2.x
is a version of kernel). You can
use command "find" from root directory
to find them.
|
|
(2) Confirm device file. If there
is no device file, e.g., /dev/video, make
it using "mknod".
|
|
(3) Install modules by /sbin/insmod.
|
|
(4) Confirm installation
by "dmesg".
|
|
If you use IO-DATA GV-VCP2M/PCI,
you should use the option of card=2
to install bttv.o: /sbin/insmod
bttv.o card=2. The capture device
is recognized as "Hauppauge
old". If you don't use
this option, second composite input
cannot be used. If you are working on Linux
with kernel 2.4.x, i2c.o may be divided
into 3 modules like i2c-core.o,
i2c-dev.o, i2c-algo-bit.o. It
is convenient to add the command for installing
the models in /etc/rc.d/rc.local for the
case of rebooting.
|
|
|
【Capture test】
|
|
You can test capture device using
distributed software like xawtv.
I prepare the following sample program to
construct vision system.
|
|
show_video_v4l.tar.gz
|
|
Uncompress the file in a directory you
use. Change default device file, /dev/video,
in capture_v4l.h for your system. Mesa and
glut must be installed to link executable
file. They may be included in the recent
distribution like Red Hat, but you can download
them from the sites in links blow. If you
succeed, you can find show_video_v4l
in the directory. Use the options -v0(composite1)
-v1(composite2) -v2(S input) according to the input
channel you use (this option may not be
used to other capture devices. Default is
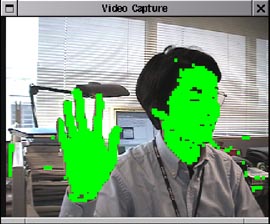
S input). You may see 320x240 video window
on X window (left figure). Option
-s enables color extractor based on
simple thresholding. Extracted pixels are
shown by green. As you can see in right figure, they
almost correspond to skin of Japanese. Push
a left button of mouse on the window to
end the program.
|
|
You may understand the overview
of programming using V4L, Mesa
and glut by the contents of sites in links
below and source code of the sample.
The first step to your own vision system
may be to replace the color extractor
of the sample by processing you need.
|
|
|
|
|
|
|