![]() Multiperspective Stereo Imaging under 6 DOF Camera Motion
Multiperspective Stereo Imaging under 6 DOF Camera Motion
Multiperspective imaging has been used to recover the structure of a scene. Although several algorithms for structure recovery have been developed as typified by stereo panoramas, there exists no common framework which subsumes various camera motions to capture stereo images. This paper presents a framework for stereo by multiperspective imaging, which is general in that it can handle 6 degree–of–freedom (DOF) camera motion. We derive geometric constraints, equation for structure recovery and that for an epipolar curve by modeling the acquisition of stereo images using pushbroom cameras (line sensors). We consider a class of camera motion called a vertical view plane class and demonstrate that several previous results are really special cases of our results.
|
|

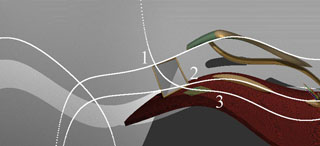
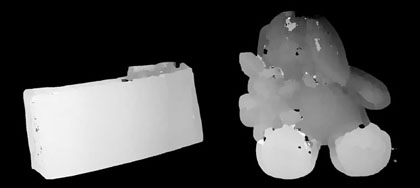
A pair of images shown in above is an example of multiperspective stereo pair obtained by cameras with 6 DOF motion. By using the derived equations, we can draw the epipolar curves shown in the right image each of which corresponds to the point in the left image (i.e.,1,2 and 3). The epipolar curves show the correctness of structure recovery because the epipolar curves which are the results of backprojection of the structure pass through the correct matching points. The followint experimental result using a real data set also demonstarates the correctness because we can get a fairly good structure recovery result (depth map).
|
|
|
|