Globally Consistent 3D LiDAR Mapping with GICP Matching Cost Factors
Kenji Koide, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno
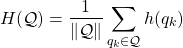
Parameters used in the experiment
Mean map entropy (MME)
Definition
Per-point entropy:
Mean map entropy:
* Razlaw et al., "Evaluation of registration methods for sparse 3D laser scans", ECMR2015.
MME of the proposed method and SuMa
Global map optimization time
Real-time processing
Real processing speed (20FPS)
* All the module are running jointly
Real KITTI data speed (10FPS) for reference