Interactive 3D Graph SLAM for Map Correction
- Kenji Koide
- Jun Miura
- Masashi Yokozuka
- Shuji Oishi
- Atsuhiko Banno
IEEE Robotics and Automation Letters, 2020
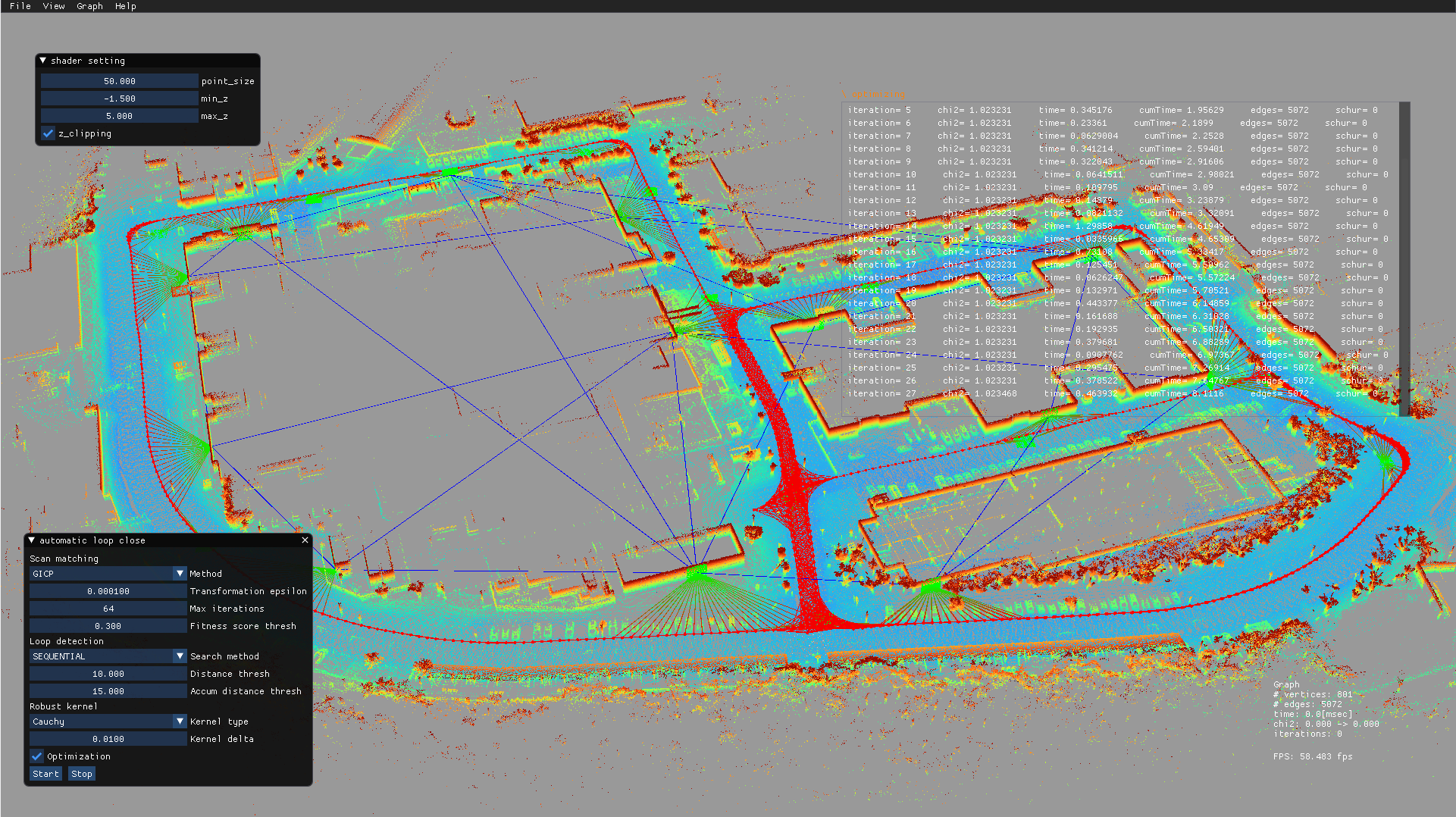
Abstract
This paper presents an interactive graph SLAM framework with a 3D LIDAR. This framework allows the user to interactively correct a 3D environmental map generated by an automatic SLAM system. By optimizing a pose graph consisting of pose constraints created by the automatic SLAM and map correction constraints, which are created by the user through a graphical user interface, we obtain a large and globally consistent 3D environmental map. We propose semi-automatic loop closing and plane-based map correction techniques for creating map correction constraints. We also devise a pose constraint update approach to refine the pose constraints given by the automatic SLAM. The evaluation results demonstrate that the proposed system enables us to improve the consistency of mapping results and obtain a mapping accuracy that outperforms state-of-the-art automatic SLAM frameworks with minimal human effort.