
医療機器レギュラトリーサイエンス
自身の開発物を臨床応用する段階で,様々な規制の壁に出会い困惑し,そののち自ら医療機器審査業務を体験しました.これらの体験を通して研究・開発者が知るべき医療機器の有効性と安全性の科学=レギュラトリーサイエンスを追究しています.
医療機器の評価期間とコストの短縮は,その医療機器の初期固定コストとなります.これを圧縮することで劇的に競争力が向上するはずです.その方法論としてのヒト臨床・動物実験の代替手段としてのin silico評価,バイオニックヒューマノイド (surgical dummy)の研究と標準化の活動を行っています.ISO 22926を活用した医療用立体モデルの付加価値向上とインプラントの薬事承認への応用について,医療用立体モデルコンソーシアムにて活動中です.
また手術支援ロボットの安全性,特に電気的安全性評価と洗浄滅菌性の確保に関する研究とノウハウの蓄積を図っています.そのほか,医療機器の自律能(autonomy)と人工知能,IoTを駆使した医療機器とその評価に興味を持っています.
関連プロジェクト
また,医療機器産業政策に関連する活動として以下を行っています.
関連プロジェクト/活動
- 医療機器等開発ガイダンス
- 医療機器開発支援ネットワーク(活動終了)
- ISO/TC 150/WG 14 “Models of tissues for mechanical testing of implants“ WGセクレタリ
- ISO 22926:2023
手術ロボティクス/標準化
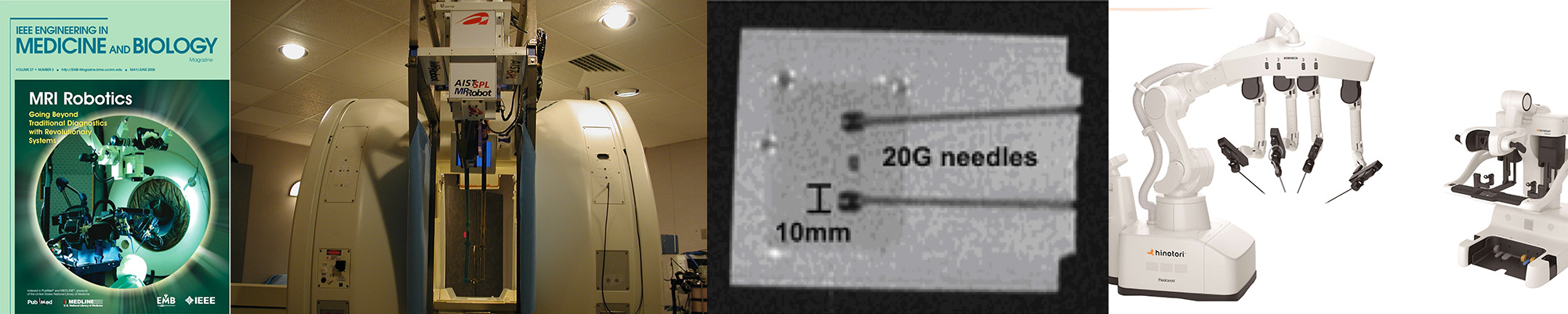
MRI内で撮像と同時に動作しても相互に悪影響を及ぼさないロボット機構を世界で初めて開発・報告しました.それらの成果はMR roboticsとして現在でも活発に研究開発が続いています.
現在は、手術支援ロボットの「操作ログ」を手術トレーニング,自律ロボットのための機械学習に応用する技術を神戸大学等と共同で取り組んでいます.あわせて操作ログの利活用と,ログを生産した外科医の権利や尊厳といったELSI (ethical, legal and social issues)にも提言しています.
日本発の手術ロボットに必要な技術開発,特にロボット部品,ナビゲーションマーカの洗浄滅菌性に関する研究を行っています.また,手術ロボット安全性の国際標準化活動においては,国際プロジェクトリーダーとして活動しています.
関連活動
- ISO/TC 299/JWG5 = IEC/TC 62/SC 62D/JWG 35 “Medical robot for surgery” プロジェクトリーダー
- IEC 80601-2-77:2019 + Amd1:2023
過去の研究活動
手術支援のバイオメカニクス

手術ロボットや針穿刺機構で脳,肝臓などにバイオプシーを行う際に,組織がどう変形するかシミュレーションを行うことでより確実に操作可能となることが期待されます.しかし,これらの組織は力学を主機能としないため,そのバイオメカニクスの解明に取り組みました.
脳組織の高次非線形構成方程式の導出,針穿刺時の先端切開力と摩擦力の分離計測による,組織境界の検知などの成果を挙げてきました.in silico評価技術の発展と,より自律的なロボット手術技術への期待により,手術支援のバイオメカニクスが再び重要性を増すと考えます.
SCC / Small Computing for Clinicals

医療機器プログラムの法制化が2014年に始まりました.これと関連して旧来は専用組込みハードでなければ性能的にも制度的にも製品化できなかったものが,PCやスマホなど汎用プラットフォーム上で遜色ない性能で実現できるようになってきています.Small Computing for Clinicals (SCC)は,医師ほか医療従事者がPC等でお試しできるシンプルなソフトウェアによって先進的な医療機器機能を体験いただく試みです.