

By installing stereo cameras ubiquitously, multi object regions are locally clipped from the range
information, and they are all recognized and are integrated in parallel.
3D and color image information are acquired at semi-video rate. Multi objects are recognized after
segmentation taking 3D information as a key. In addition, all results are integrated to understand human
behaviors in a scene.

For the acquisition of 3D structure, the PC connected with each stereo camera by IEEE1394 locally carries out
the reconstruction of 3D information as a local process.
By integrating all the results on one computer, the system acquires 3D information as a
global process. Figure(left) indicates a ubiquitous 3D reconstruction image integrated on it. It is possible
to observe this image, while the viewpoint position is changed at the same frame rate.
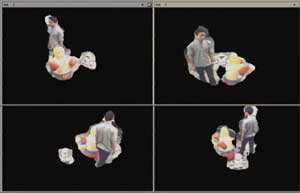
The system extracts and segments the objects using 3D information (range image) as a key in the scene.
It aims to understand human behavior in the indoor space by simultaneously recognizing face, arm pointing gesture
and other things.
[ Back to Foundations&Applications | Top]
Copyright© National Institute of Advanced Industrial Science and Technology (AIST). All rights reserved