キャスティングマニピュレーションについて
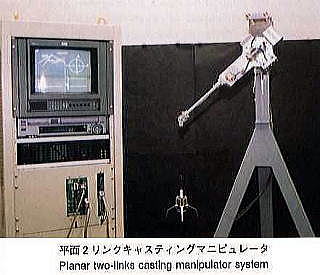
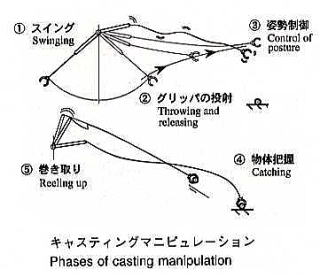
農業、土木・建設業、宇宙開発など広い作業空間を要求する分野への適用を目的として、紐のような柔らかい材料を用いた伸縮自在の腕を有するロボットシステムによる物体操作技術「キャスティングマニピュレーション」の研究開発を行っています。 従来のロボットアームの物体操作技術に比べ、本手法では、作業領域の拡大、動作の高速化、省エネ化が期待されます。この「キャスティングマニピュレータ」による物体捕獲・回収動作の実現には、柔軟部材の特性を巧みに利用した高度な運動計画/運動制御法の開発が必要です。現在、この一連の動作を実現するために、動的に安定なスイング動作の生成、グリッパを目標点へ精度よく到達させるための運動計画、空中におけるグリッパの姿勢制御などの研究に取り組んでいます。
| 項 目 | 目的及び内容 | 期 間 | 成 果 |
| (イ)ロボット群の耐故障性に関する研究 | ロボット群による協調作業において、誤情報が全体に伝達されてシステムがダウンする問題に対して、情報伝達を制御する。 | 1990.4.1〜1991.3.31 | データフローを制御することにより誤情報を発信するロボットを同定したり、誤情報の伝達を局所的に抑制する方法を明らかにした。 |
| (ロ)ロボット群の協調作業における制御に関する研究 | ロボット群による協調運搬作業に対して、個々のロボットの出力特性を考慮した駆動方法を明らかにする。 | 1991.4.1〜1993.3.31 | 閉リンク駆動冗長系における出力特性を関節駆動源の出力特性から明らかにして、運搬物重量・運搬速度の条件に対応した最適な駆動制御法を提案した。 |
| (ハ)ロボットマニピュレータの動的な運動特性に関する研究 | 一般的なロボットマニピュレータの関節駆動源の特性を調べて、ロボットの動力学的な手先運動特性を明らかにする。 | 1993.4.1〜1996.3.31 | DCモータの速度と駆動力の関係を調べ、シリアルならびにパラレルマニピュレータの手先位置に対する速度発生領域、加速度発生領域を示す指標を提案した。 |
| (ニ)エージェント指向によるロボット制御の研究 | 作業をプリミティブな動作に分解し、各動作を制御する処理系に対して、作業が効率的に行われるような分散処理システムの開発を行う。 | 1996.4.1〜1998.3.31 | 動的に変化する環境における物体捕捉作業に対して、作業を構成する各動作を分散的に処理し、動作間の競合、協調を考慮したアルゴリズムを開発した。 |
| (ホ)人間とロボットの協調のためのインターフェース技術 | 操作者に安全に力を提示するために、クラッチを用いたインターフェースを開発する。 | 1998.4.1〜2001.3.31 | リンク系の各関節にパウダークラッチを用いて制御することにより、操作者に過大な力を与えずに、安全に力覚を提示する装置を開発した。 |
| (ヘ)キャスティング作業システムの機構と制御に関する研究 | 動作中に変形する柔軟物を操作する制御技術を確立するために、紐のような柔軟リンクを有する機構系によるマニピュレーション技術を明らかにする。 | 1999.4.1〜2001.3.31 | 紐のような柔軟で可変長なリンクを有するマニピュレータを開発し、遠方にある対象物等を捕獲・回収する制御手法を明らかにした。 |