
 National Institute of Advanced Industrial Science and Technology (AIST), Japan
National Institute of Advanced Industrial Science and Technology (AIST), JapanPurpose
Training CD 1.0, as well as Training CD 0.0, has been developed as a training material for beginners to acquire obstacle perception in the blind rehabilitation and education. Training CD 1.0 contains acoustic cues of obstacle perception, that can hardly been heard in actual environment, in ideal status so that the beginners can easy to listen. It is useful for assisting the beginner's training, and as a teaching material to understand basic principles of obstacle perception.
Concepts
Training CD 0.0 was a database containing many situations assuming various scene of encountering objects. For Training CD 1.0, the sound data that are not useful for actual training are removed, and more useful situations are supplied. The following four points are modified;
- Sound data made of actual environmental sound are supplied.
Only white noise data were provided for Training CD 0.0, whereas the sound data made of true-recorded actual environment noise are supplied for Training CD 1.0 so that more practical training can be conducted.
- All data are in moving condition.
Most of the data in Training CD 0.0 were in the conditions that the wall (object) keeps standing still. For Training CD 1.0, all data are in moving condition so that the beginner can easily understand.
- The data for headphone listening are removed.
Training CD 0.0 contained both data for loudspeaker and headphone listening. For Training CD 1.0, the headphone data are removed because reproducing precision of HRTF simulation that was used for making them is very poor.
- The footstep sounds were omitted.
Training CD 0.0 contained the training data for use of footstep reflection. For Training CD 1.0, they are omitted because of poor needs.
How to play and listen
Training CD 1.0 can be played by a general stereo audio CD player for home use. Purchasing special equipments is not required.
* Training CD 1.0 is 8cm single size CD. Some audio set requires the adopter to play it.
* Monaural audio set can not be used for play (sounds reproduced by monaural set can not be used for training).
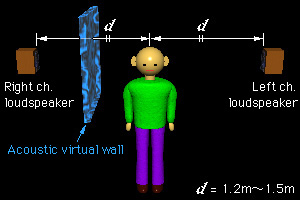
At first, the listener must find the room that is as anechoic as possible, and the place that is away from walls in room (ex. center of the room). The two loudspeakers are arranged 2.4m - 3.0m apart and facing each other. The listener's head is at the center of the two loudspeakers. In this setup, by playing Training CD 1.0, the acoustical virtual wall will be appeared at the designated distance in direction of the right channel loudspeaker.
* Headphone can not be used for listening (sounds reproduced through headphone can not be used for training).
* The distance
will be defined in [5] contents.
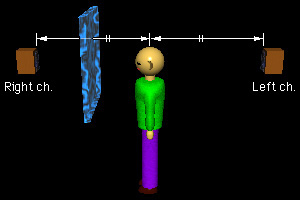
When the right channel loudspeaker is in right of the listener, and left channel is in left, the wall appears in right of the listener (Fig. 1). If the right and left channel loudspeakers are swapped, the wall will appear in left. The wall can appear in front of the listener when the right channel is in front and left channel is in back (Fig. 2).
The listener is not required to keep still during playing. The listener is allowed to change head direction, or move head closer to the wall so as to understand the sound variation caused by the head movement.
* Do not move head far from the center of the two loudspeakers. Keep within 20cm.
Contents
Training CD 1.0 is 8cm single size CD that contains 42 tracks and 21minutes 49seconds total time (the net total time is 20minutes 26seconds, because the total time includes the silent intervals between tracks).
The 42 tracks consist of 2 sounds x 21 patterns of distance variation. The following are explanations of sounds and distances.
Sounds
The following 2 sounds are used in Training CD 1.0.
- White noise
It is the steady noise including all frequency band of CD (i.e. under 22.05kHz) evenly.
- Environmental noise
It is the sound made of true-recorded environmental sounds. It is made by mixing road noise and sounds at a green field.
Distances
The distance
in this manual is defined as a distance between center of the two loudspeakers and surface of the virtual wall (object). The patterns of distance variation included in Training CD 1.0 are the following 4 groups, 21 patterns.
- Group I : Move from 3m to 0.2m
The virtual wall moves from 3m to 0.2m in constant velocity, and stay at 0.2m for 5s. The velocities are the following 3 patterns.
- 0.7m/s (approach time : 4s, total time : 9s)
- 0.4m/s (approach time : 7s, total time : 12s)
- 0.2m/s (approach time : 14s, total time : 19s)
Fig. 3 Distance (m) as a function of time (s) in Group I. v = 0.7m/s, 0.4m/s, and 0.2m/s. - Group II : Move between 3m and 0.2m
The virtual wall moves between 3m and 0.2m in constant velocity. The velocities are the following 3 patterns.
- 0.7m/s (go-and-return time : 8s, go-and-return number : 7 times)
- 0.4m/s (go-and-return time : 14s, go-and-return number : 4 times)
- 0.2m/s (go-and-return time : 28s, go-and-return number : 2 times)
Fig. 4 Distance (m) as a function of time (s) in Group II. v = 0.7m/s, 0.4m/s, and 0.2m/s. - Group III : Jump from infinity
The virtual wall keeps staying at infinite distance (i.e. there is no wall) for 5s, and suddenly jumps to finite distance. The finite distances are the following 11 patterns. Total time of each pattern is 15s.
- 2.0m
- 1.5m
- 1.0m
- 0.9m
- 0.8m
- 0.7m
- 0.6m
- 0.5m
- 0.4m
- 0.3m
- 0.2m
Fig. 5 Distance (m) as a function of time (s) in Group III. d = 2.0m, 1.5m, 1.0m, and 0.9m - 0.2m (0.1m step). - Group IV : Random
The virtual wall moves randomly. This group imitates actual mobility environments. There are the following 4 patterns. Total time of each pattern is 60s. This group is recommended to be listened in condition that the virtual wall appears in lateral direction (i.e. the loudspeakers are arranged in right and left).
- Slant wall
The distance varies continuously. It is similar to the situation that the listener walks along slant wall.
Fig. 6 Distance (m) as a function of time (s) in the Slant wall. - Rough wall
The distance varies non-continuously. It is similar to the situation that the listener walks along rough wall.
Fig. 7 Distance (m) as a function of time (s) in the Rough wall. - Exits
The distance changes to infinity at several points. It is similar to the situation that the listener walks along the wall that has several exits.
Fig. 8 Distance (m) as a function of time (s) in the Exits. - Poles
The distance is usually infinity but sometimes changes to less than 1m. It is similar to the situation that the listener walks along the street that has several poles.
Fig. 9 Distance (m) as a function of time (s) in the Poles.
Track list
The following is the track list of Training CD 1.0. There are 42 tracks in all. Each row in this list is described in order of Track No. : Sound : Pattern : Time.
- 01 : White : Move from 3m to 0.2m in 0.7m/s : 9s
- 02 : White : Move from 3m to 0.2m in 0.4m/s : 12s
- 03 : White : Move from 3m to 0.2m in 0.2m/s : 19s
- 04 : White : Move between 3m and 0.2m in 0.7m/s : 56s
- 05 : White : Move between 3m and 0.2m in 0.4m/s : 56s
- 06 : White : Move between 3m and 0.2m in 0.2m/s : 56s
- 07 : White : Jump from infinity to 2.0m : 15s
- 08 : White : Jump from infinity to 1.5m : 15s
- 09 : White : Jump from infinity to 1.0m : 15s
- 10 : White : Jump from infinity to 0.9m : 15s
- 11 : White : Jump from infinity to 0.8m : 15s
- 12 : White : Jump from infinity to 0.7m : 15s
- 13 : White : Jump from infinity to 0.6m : 15s
- 14 : White : Jump from infinity to 0.5m : 15s
- 15 : White : Jump from infinity to 0.4m : 15s
- 16 : White : Jump from infinity to 0.3m : 15s
- 17 : White : Jump from infinity to 0.2m : 15s
- 18 : White : Random (Slant wall) : 60s
- 19 : White : Random (Rough wall) : 60s
- 20 : White : Random (Exits) : 60s
- 21 : White : Random (Poles) : 60s
- 22 : Environmental : Move from 3m to 0.2m in 0.7m/s : 9s
- 23 : Environmental : Move from 3m to 0.2m in 0.4m/s : 12s
- 24 : Environmental : Move from 3m to 0.2m in 0.2m/s : 19s
- 25 : Environmental : Move between 3m and 0.2m in 0.7m/s : 56s
- 26 : Environmental : Move between 3m and 0.2m in 0.4m/s : 56s
- 27 : Environmental : Move between 3m and 0.2m in 0.2m/s : 56s
- 28 : Environmental : Jump from infinity to 2.0m : 15s
- 29 : Environmental : Jump from infinity to 1.5m : 15s
- 30 : Environmental : Jump from infinity to 1.0m : 15s
- 31 : Environmental : Jump from infinity to 0.9m : 15s
- 32 : Environmental : Jump from infinity to 0.8m : 15s
- 33 : Environmental : Jump from infinity to 0.7m : 15s
- 34 : Environmental : Jump from infinity to 0.6m : 15s
- 35 : Environmental : Jump from infinity to 0.5m : 15s
- 36 : Environmental : Jump from infinity to 0.4m : 15s
- 37 : Environmental : Jump from infinity to 0.3m : 15s
- 38 : Environmental : Jump from infinity to 0.2m : 15s
- 39 : Environmental : Random (Slant wall) : 60s
- 40 : Environmental : Random (Rough wall) : 60s
- 41 : Environmental : Random (Exits) : 60s
- 42 : Environmental : Random (Poles) : 60s
Tips on listening, and lessons
Principle
One of the major factors of obstacle perception is the reflected sound that comes from the wall (object). The reflected sound arrives at the listener later than the direct sound. The interval between the direct sound and the reflected sound is called delay time
. The delay time is proportional to the distance between the listener and the wall (object). The sound variation depending on the delay time is an important cue of obstacle perception. The first step to acquire obstacle perception is to learn the relation between the sound variation and the distance of the wall (object).
Training CD 1.0 provides the direct sound from the left channel loudspeaker and the reflected sound from the right, and the distance of the wall (object) is controlled by the delay time of the reflected sound. The sound pressure levels and spectrums of both sounds are the same so that beginner can listen to them easily. The details of technical information are provided by the following reference.
Sound variations
The following explains details of sound variations. Both the sound image and the timbre vary depending on the distance of the wall (object).
-
Generally, when we listen to a sound, we can know the spatial characteristics, that is, which direction or how far the sound comes from, as well as what the sound is. The sensation of sound perceived with the spatial characteristics is called
sound image
. For example, when we listen to the music played by audio set, and perceive piano sound coming from center of the two loudspeakers, we can express this situation as the following;The sound image of the piano is located at center of the two loudspeakers
.The sound images of the direct and reflected sounds vary depending on approach of the wall (object). (Fig. 10)
- When distance is above 2m
The sound images of the direct and reflected sounds are located in each coming direction. In this status, the listener can not distinguish the reflected sound from the environmental sound coming from the wall (object) direction. Therefore, the listener can hardly know existence of the wall (object) .
- When distance is between 2m and 1m
Only the sound image of the direct sound is perceived, and the sound image of the reflected sound fades out, because the delay time decreases. This phenomenon is called
precedence effect
. In this situation, the direction of the wall (object) seems quiet, and the listener often feelpressure
in the wall (object) direction. The listener can know that the wall (object) exists near by this variation. - When distance is below 1m
The sound image located in the direction of the direct sound approach to the listener's head, and the pressure felt in the wall (object) direction increases. The listener can know that the wall (object) exists quite near by this variation.
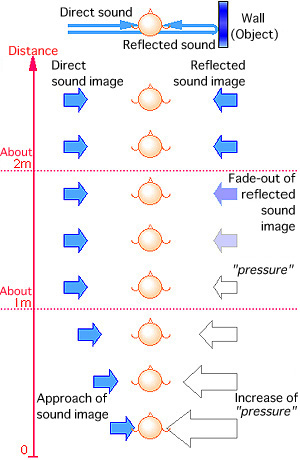
Fig.10 Sound image variation as a function of distance. - Variation of timbre
When the direct sound and the reflected sound are heard simultaneously, the both sounds give rise to interference, and their timbre varies. This phenomenon is called
coloration
. When the coloration occurs, the listener usually perceives pitch.The perceived pitch is equal to the inverse of the delay time, and the delay time is proportional to the distance. Thus, the pitch is inversely proportional to the distance, and defined uniquely. That is to say, the listener can know the distance by the pitch (Fig. 11).
* The pitch (Hz) is given by dividing the sound velocity (m/s) by twice as much as the distance (m).
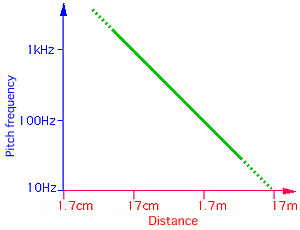
Fig.11 Timbre variation as a function of distance. The coloration is usually disturbed by the sounds other than the direct and the reflected sounds. Therefore, the coloration is hard to be heard in the actual environment.
Lessons
First, please try Group I of the white noise (Track No. 1 - 3). When the distance decreases, can you understand that the sound images vary in order of the following three?
* Please choose the easiest velocity to listen from the three.
- When distance is above 2m
The both left and right channel loudspeakers seems to be sounding as the same
- When distance is between 2m and 1m
The loudness of the right channel loudspeaker (i.e. the reflected sound) decreases as the distance decreases, and the pressure occurs on the right channel loudspeaker side of your face.
- When distance is below 1m
The sound image located in the direction of the left channel loudspeaker approaches to you. The pressure on the right channel loudspeaker increases further.
Can you understand the timbre varies as the distance decrease? The timbre changes higher as the distance is shorter. Comparing with the sound image variation, the timbre variation is hard to be heard in the actual environment. Thus, it is important to learn the feature of the timbre variation in this lesson.
The listener can hear the sound image variation well when the wall (object) exists in side of the head, and the timbre variation well when it exists in front. Please try this with changing the reproducing direction of the wall (object). In addition, because the timbre variation is hard to be heard in the actual environment, the detection sensitivity of obstacle perception to the frontal wall (object) for which the listener can use the sound image variation easily is higher than to the side direction.
If you have understood the relation between the distance decrease and the sound variation, please experience the sound variation caused by approach and evasion by using Group II (Track No. 4 - 6). Can you feel unconsciously that the wall (object) approaches or goes away?
Next lesson uses Group III (Track No. 7 - 17). Can you answer approximate distance by listening the distance chosen from the 11 distances randomly by the shuffling mode of CD player or somebody's help? When you listen, you can move your head to the reproduced wall (object) near and far, or rotate your head, and you can test the sound variation with respect to the head movement. Of course you are not required to answer a strict distance in precision of 0.1m, but please lesson so as to be able to answer approximate distance.
The last lesson uses Group IV (Track No. 18 - 21). The four patterns of Group IV imitate actual mobility environments. In Slant wall
, can you perceive the continuous variation of the wall distance? In Rough wall
, can you understand the distance changes near or far by listening the non-continuous sound variation? In Exits
, can you find the exits that sometimes appear in the wall? In Pole
, can you find the poles that sometimes appear in the empty space?
* The sound pressure level or the spectrum of the reflected sound that come from the pole-state object may varies depending on the distance. However, Pole
does not include the variations so that the beginner can understand easily.
You can proceed to the same lessons using the environmental noise (Track No. 22 - 42) after the white noise lessons. While the white noise is steady, the environmental noise has natural variation. To conduct obstacle perception in actual environment, you have to distinguish the sound variation caused by the wall (object) from the natural variation without confusing. Let's try!
Frequently asked questions
Q&A Table of contents
- Q1. The wall (object) can not be reproduced well depending on the room. Why?
- Q2. Do we have to purchase special Hi-Fi audio set in order to reproduce?
- Q3. Can we listen through headphone?
- Q4. Can we play by monaural audio set?
- Q5. Why do clicks sometimes appear when the wall (object) distance changes?
Q&A Body
-
A. Because the reflected sounds coming from the walls and the ceil are disturbing. Please listen in the room that is as low-reflection and silent as possible. The most suitable room for listening is an anechoic chamber, but it does not exists in your home or school for the blind. However, you can still make an effort to reduce the disturbance of the reflection. The low-reflection room is the room whose wall and floor are made of soft or rough materials, or the room that has furniture or curtains or carpet on the wall or floor and their surfaces are covered, or the room that is as wide as possible and in which the reflected sounds can hardly arrive at the listener. Arranging the two loudspeakers away from the wall and in non-parallel and non-orthogonal direction with respect to the walls (for instance, arranging them on the diagonal line of the room) yields good results.
-
A. No, you don't. You can use normal stereo set for home use, priced at hundreds US$. If somebody tries to reproduce the virtual object by playing the sounds recorded in the actual environment where the object exists, the special Hi-Fi audio set will be needed. Because the cues of obstacle perception in the actual environment are buried under the other environmental sounds. However, Training CD 1.0 contains only the acoustical cues of obstacle perception produced by the ideal computer simulation, so that even a normal audio set which does not have so high fidelity can reproduce enough. In addition, high reproducibility of sound direction and arriving time is more important rather than high fidelity, in order to reproduce the cues of obstacle perception. Therefore, low cross-talk (phenomenon that signal of right or left channel leaks to another channel) and high homogeneity across both channels are required. You, however, do not need to worry about these points, because the audio sets that is put on the market today have high quality enough to satisfy them.
-
A. You can hear some sounds but they are nonsense. Please play with arranging the loudspeakers as instructed in [4] How to play and listen.
-
A. You can hear some sounds but they are nonsense. Please play with arranging the stereo loudspeakers as instructed in [4] How to play and listen.
-
A. The clicks appear when the distance changes non-continuously, in Group III (Track No. 28 - 38),
Rough wall
(Track No. 40),Exits
(Track No. 41), andPoles
(Track No. 42) of the environmental noise. This is because, on making the sound data, the sound amplitude becomes pulse-state in the moment of changing the distance non-continuously, and therefore it is not a defect. In the lesson using Training CD 1.0, the listener can use the clicks as a cue to know that the distance changes, though the clicks do not exists in the actual environment. Please do not use the clicks as a cue. The clicks will be terminated in the next version up.