操作、加工、組立といった工程を考慮すると、微細作業に要求される マイクロマニピュレータは、微小対象物の回転も含めた6自由度の高精度な位置決め が実現できなければならない。
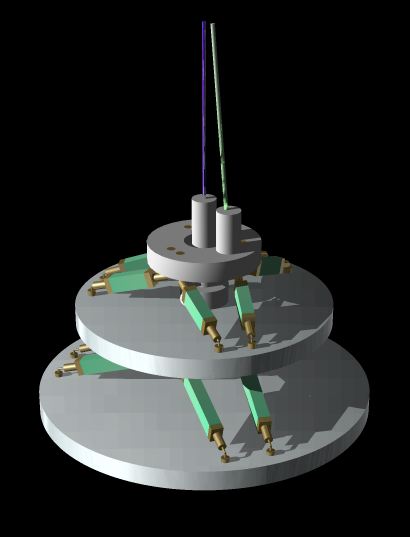
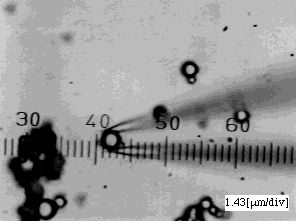
コンパクトで多自由度な動作が可能な機構としてパラレルメカニズムが挙げられる。 これはエンドエフェクタ部と、ベース部とを複数のリンクで並列に支える機構であり、 高精度な位置決めができる、強い力が出せる、コンパクトな機構で多自由度な動きが 実現できる等の特徴を持っている。この高精度な位置決めと、コンパクトな機構で 多自由度な動きが実現できることは、微細作業にとって重要な要素であり、 マイクロマニピュレータの機構として有効と思われる。本研究では、 パラレルメカニズムを利用した二本指マイクロハンドを開発するにあたって、 その作業領域や制御手法の容易さから見て適切な機構について考察し、 それに基づき二本指マイクロハンドを試作した。 これを用いて、直径2[micro m]のガラス玉を把持し所定の場所に位置決めする 微細作業に成功した。
関連論文
Pasi Ojala, Tatsuo Arai, Tamio Tanikawa, Heikki Koivo: "Motion Optimization and Control of the 7 D.O.F. Micro Manipulator", Proc. Scandinavian Symposium on Robotics, pp. 132-136, October 4-6,1994
Pasi Ojala, Tatsuo Arai, Tamio Tanikawa: "Kinematic Analysis and Motion Control of a Redundant Micro Manipulator" , Proc. 2nd Japan-France Congress on Mechatronics, pp.473-476, Nov. 1-3, 1994
Tamio Tanikawa, Tatsuo Arai, Masami Saeki: "Two-Finger Micro Hand", Proc. IEEE International Conference on Robotics and Automation, pp.1674-1679, May 21-27, 1995
Tamio Tanikawa, Tatsuo Arai, Takanori Masuda: "Development of Micro Manipulation System with Two-Finger Micro Hand", Proc. IEEE/RSJ International Conference on Intelligent Robotics and Systems, pp. 850-855, Nov. 4-8, 1996
Tatsuo Arai, Jacques M. Herve, Tamio Tanikawa: "Development of 3 DOF Micro Finger", Proc. IEEE/RSJ International Conference on Intelligent Robotics and Systems, pp. 981-987, Nov. 4-8, 1996
谷川民生、新井健生:"二本指マイクロハンドの設計と微細作業",日本ロボット学会誌,Vol.15, No. 2, pp. 284-289,(1997)
新井健生, 谷川民生, Rene Larsonneur: "マイクロハンドを構成するフィンガーモジュールの機構と制御",日本ロボット学会誌, Vol.15, No. 3, pp. 402-407,(1997)
Tamio Tanikawa, Tatsuo Arai, Yoshiyuki Hashimoto: “Development of Vision System for Two-fingered Micro Manipulation,” Proc. IEEE/RSJ International Conference on Intelligent Robotics and Systems, pp. 1051-1056, Sept. 7-11, 1997
Tatsuo Arai, Tamio Tanikawa: “Micro Manipulation Using Two-Finger Hand,” Proc. Workshop on Working in the Micro- and Nano-Worlds: Systems to Enable the Manipulation and Machining of Micro-Objects(Grenoble), pp.12-19, Sept. 7-11, 1997
谷川民生、新井健生:“二本指マイクロハンド用操作デバイスの開発とその制御”,日本ロボット学会誌、Vol. 16, No. 4, pp. 109-115,(1998)
Tamio Tanikawa, Yoshiyuki Hashimoto, Tatsuo Arai: “Micro Drops for Adhesive Bonding for Micro Assemblies and Making a 3-D Structure “Micro Scarecrow”,” Proc. IEEE/RSJ International Conference on Intelligent Robotics and Systems, pp. 776-781, Oct. 13-17, 1998
Tamio Tanikawa, Tatsuo Arai, “Development of a Micro-Manipulation System Having a Two-Fingered Micro-Hand,” IEEE Transaction on Robotics and Automation, vol.15, No. 1, pp. 152 -162, Feb., 1999
James Nielsen, Tamio Tanikawa, Tatsuo Arai: “Design and Analysis of a 3-DOF Micromanipulator,” Proc. of the 1999 IEEE International Conference on Robotics and Automation, pp. 2183-2188, May 10-15, 1999
Tamio Tanikawa, Tatsuo Arai, Noriho Koyachi: “Development of Small-sized 3 DOF Finger Module in Micro Hand for Micro Manipulation,” Proc. IEEE/RSJ International Conference on Intelligent Robotics and Systems, pp. 876-881, Oct. 17-21, 1999
Yoshiki Ohya, Tatsuo Arai, Yasushi Mae, Kenji Inoue, Tamio Tanikawa: “Development of 3-DOF Finger Module for Micro Manipulation,” Proc. IEEE/RSJ International Conference on Intelligent Robotics and Systems, pp. 894-899, Oct. 17-21, 1999
Tamio Tanikawa, Hitoshi Maekawa, Kenji Kaneko, Makoto Tanaka: “MICRO ARM FOR FEEDING AND MICRO HAND FOR ASSEMBLY ON MICRO FACTORY IN MECHANICAL ENGINEERING LABORATORY (MEL)”, Proceedings of 2000 Japan-USA Symposium on Flexible Automation, 2000JUSFA-13034, July 23-26, 2000
Tamio Tanikawa, Hitoshi Maekawa, Kenji Kaneko, Makoto Tanaka: “Micro Arm for Transfer and Micro Hand for Assembly on Machining Microfactory”, Proceeding of 2nd International Workshop on Microfactories, pp.155 –158, Oct. 9-10, 2000
Tamio Tanikawa, Masashi Kawai, Noriho Koyachi, Tatsuo Arai, Takayuki Ide, Shinji Kaneko, Ryo Ohta, Takeshi Hirose: “Force Control System for Autonomous Micro Manipulation”, Proc. of the 2001 IEEE International Conference on Robotics and Automation, pp. 610-615, May 21-26, 2001
谷川民生、新井 健生:“並進3自由度を有するマイクロフィンガーモジュール、”日本ロボット学会誌,Vol. 20, No. 2,pp. 74-83、2002
Yousuke Katoh, Tatsuo Arai, Kenji Inoue, Yasushi Mae, Tamio Tanikawa, “Vision System for Micromanipulation,” Journal of Robotics and Mechatoronics,14-2,pp. 203-209、2002
Yoshihiko Koseki, Tamio Tanikawa, Noriho Koyachi, Tatsuo Arai, “Kinematic Analysis of Translational 3-DOF Micro Parallel Mechanism Using Matrix Method,” Advanced Robotics, 16-3, pp.251-264, 2002
Tamio Tanikawa, Masashi Kawai, Noriho Koyachi, Tatsuo Arai, Takayuki Ide, Shinji Kaneko, Ryo Ohta, Takeshi Hirose:“Force Control System for Autonomous Micro Manipulation”,Journal of Robotics and Mechatronics,14-3,pp.212-220、2002
Tamio Tanikawa, Motohide Ukiana, Kazuhiro Morita, Yoshihiko Koseki, Kotaro Ohoba, Kazuhiro Fujii, Tastuo Arai: “Design of 3DOF Parallel Mechanism with Thin Plate for Micro Finger Module in Micro Manipulation”, Proceedings of IEEE/RSJ International Conference on Intelligent Robotics and Systems, pp.1778-1783, 2002