自動車運転行動予測ソフトウェア[関連文献]
熊谷徹
ヒューマンライフテクノロジー研究部門
産業技術総合研究所
<<概略>>
多くの交通事故は、車両が安全な場所に停止することによって防ぐことができます。
その典型例として右直事故があげられます。右直事故とは、右折車両とこれに対向する直進車両の間で発生する事故で、車両間の相対速度が大きいことから、しばしば重大な損害を招きます。右直事故の直接原因は、対向する直進車両があるとき、右折車両が無理な右折をしてしまうことにあります。
こうした事故を防止するためには、車両が安全な位置に停止するという通常の行動から逸脱したときに、運転者に警告をだすことが有効であると考えられます。このために必要な技術として、ここでは車両の将来の挙動を予測し停止する確率を計算するソフトウェアの開発を行いました。
<<ソフトウェアの構成>>
開発したソフトウェアは、自動車運転行動をモデル化する部分と、運転行動モデルを用いて、将来の運転行動を予測する部分とからなります。
モデリングは、図1に示すモデル(Switching Linear Dynamical SystemまたはAuto Regressive Hidden Markov Modelと呼ばれる)のパラメータを、自動車運転行動データを用いて調整することにより行います。パラメータの調整にはEMアルゴリズムを用います。
図1 運転行動モデル
将来の運転行動の予測は確率推論としてなされます。図1のモデルは、ダイナミックベイジアンネットワークと呼ばれる確率ネットワーク・動的確率モデルの一つです。ベイジアンネットワークの推論の手順は、一般にJunction Tree Algorithmと呼ばれる推論アルゴリズムによって導出されます。ここでは、Junction Tree Algorithmによって導出された計算手順を、効率的な計算が可能となるように修正したものをインプリメントしました。
ここで運転行動の予測は、確率分布の予測という形で行われます。図2に、将来の速度の確率分布を予測した例を示します。ここでは、交差点に到達する4秒前の時点(グラフではtime=0[s]の時点)で予測を行っています。予測された速度の確率分布には、二つの尾根が見られます。大きくわけて二つの運転行動が予測されていることを意味しています。一つは、交差点で停止する運転行動(速度が0[km/h]になる)、もう一つは、交差点で徐行はするが停止しない運転行動です。
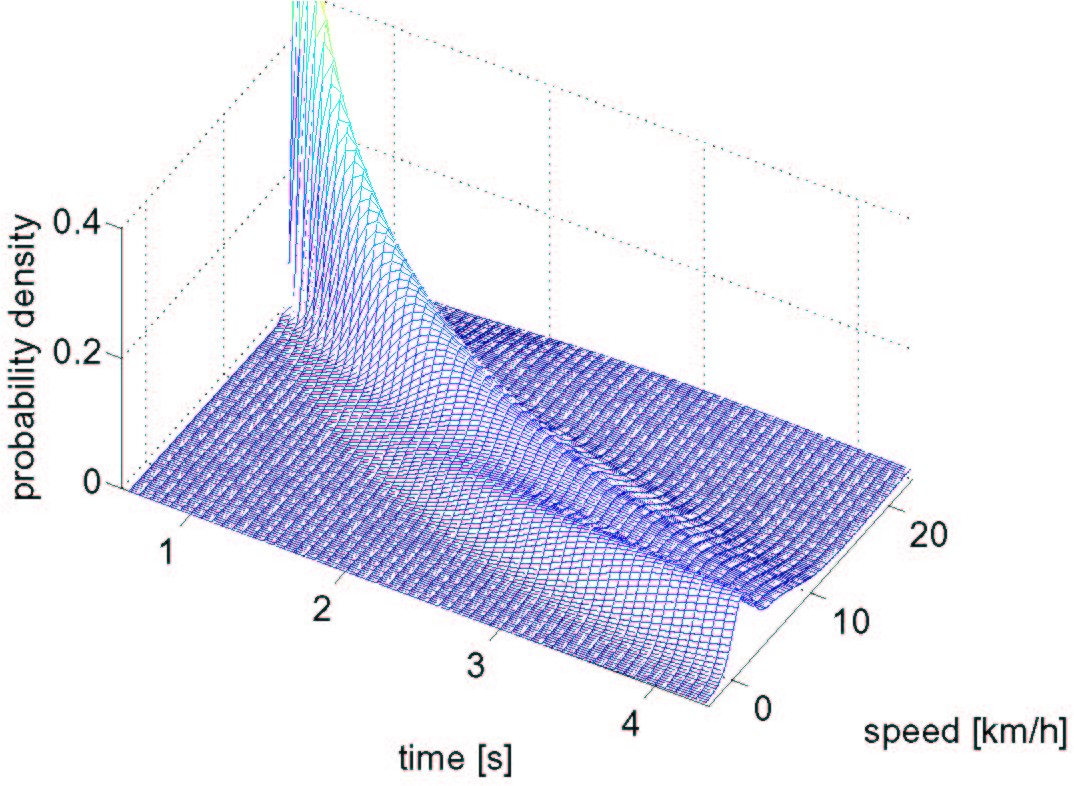
図2 速度の確率分布の予測
<<将来の停止確率の予測>>
図2では、将来の速度の確率分布が予測されました。ここで「停止」を「十分に速度が低くかつブレーキを踏んでいる状態」と定義することにより、将来の停止確率を計算することができます。図3に停止確率の予測例を示します。
図3 停止確率の予測: 上段は速度の経過。中段はアクセルとブレーキペダルの操作。下段は赤丸の時点で予測した将来の停止確率。
熊谷徹 人間福祉医工学研究部門
混合因子分析に基づく多チャンネル信号処理のためのノイズ除去
脳磁場・脳波計測等の多チャンネル信号計測では、刺激等に同期して複数回計測されたデータの加算平均をとることにより関心のない脳活動や外部からのノイズを除去する加算平均法が用いられる。しかし加算平均法は、まれに混入する眼球運動や外部環境に起因するノイズを除去することができない。このソフトウェアは、こうしたノイズの混入した計測の検出と除去を行うものである。また多数の計測のなかから被験者がタスクを失敗したことなどによる脳活動の変動も検出することができる。このソフトウェアは混合因子分析を用いることにより、基礎律動等にうもれて発見することの難しいノイズや脳波の変動の検出を可能にする。[関連文献]
視覚刺激呈示
感覚刺激誘発脳磁場および事象関連脳磁場の計測実験のために開発された刺激呈示システム。視覚刺激として格子縞を初めとした各種刺激パターンを表示可能。四種類までのトリガーを出力することが可能。外部に刺激装置を接続することにより視覚刺激以外の刺激を呈示することが可能。P3等の事象関連脳磁場の計測のために複数の刺激を過率的に呈示することが可能。[関連文献]
リカレントネットワークと遺伝アルゴリズムに基づく行動学習
リカレントネットワークは、柔軟な表現能力を持ち様々な行動を記述できる。このソフトウェアは遺伝アルゴリズムを学習エンジンに採用することにより合目的な一連の動作をリカレントネットワーク内に獲得することを可能にしたものである。ポピュレーションコーディングと、遺伝アルゴリズムのオペレータとして部分コピーオペレータを採用することを提案し、効率的な行動学習を可能にした。[関連文献]
リカレントネットワーク設計
南雲佐藤型ニューロンを構成要素とするリカレントネットワークは、多種多様なシーケンスを記憶することができる能力を持つことが知られている。このソフトウェアは、複数のニューロンを持つ南雲佐藤型のリカレントネットワークに複数の状態を持つシーケンスを埋め込む効率のよい手法を提供する。シーケンス間の遷移を引き起こす外部入力を設計することができる。[関連文献]
多自由度系学習制御
多自由度で非線形な制御対象を、複数の一次または二次のサブシステムに分割し、それぞれをニューラルネットワークを用いて非線形学習制御することにより、系全体を学習制御するシステム。サブシステム間に非線形な干渉がある場合にも、ニューラルネットワークの非線形学習機能により良好な制御が期待できる。具体的な適用対象としては、倒立振子系や、ダナミックマスダンパー(動吸振器)が上げられる。[関連文献]