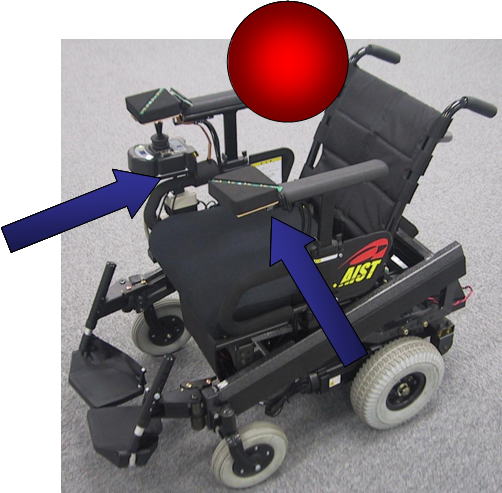
(全体写真)音声コマンドで操作可能な音声認識電動車いす
ジョイスティック操作などは困難でも言葉を発声することは容易な方を対象として、「まえ」「みぎ」「ひだり」・・・など音声コマンドを認識して操作可能な音声認識電動車いすの研究開発を行っています。
従来からある音声認識電動車いすは頭部にマイクを装着するヘッドセットマイクを用いてユーザの音声を入力していますが、音声認識電動車いすを必要としている方にとってはヘッドセットマイクを装着したり、使用中にずれたマイクの位置を修正することなどは必ずしも容易ではありません。開発した音声認識電動車いす(上図)は、左右の肘掛先端に複数のマイクを設置することで、ユーザはマイクを装着せずに電動車いすの操作が可能になります。
しかし、口元から離れた肘掛先端にマイクを設置すると、収録されるユーザ音声のパワーが小さくなるため、
などが問題になります。これらの問題に対して以下のような対策をとっています。
(ユーザ音声と周囲音声の区別)
ユーザが車いすに座っているとき、ユーザの口は凡そ上図の赤い領域内に入ります。周囲音声は図中青色の矢印で示したように車いすの外部から到来します。つまり、音がどの位置またはどの方向から到来したのかを観測することで、ユーザ音声と周囲音声を区別することができるようになります。そして、このような音源定位は、複数のマイク(マイクアレイ)を用いることで実現できます。この音源定位の機能により周囲にいる人が「まえ」「みぎ」・・など音声コマンドを発声しても車いすが反応しないようにすることができます。
(ユーザ音声の誤認識)
音源定位の結果に基づいてマイクアレイの指向特性を操作し、上図の赤い領域内で発声した音声は強調して、それ以外の周囲から到来する周囲音声または雑音は抑圧する音源分離を行います。更に、マイクアレイで除去しきれない無指向性雑音などによる歪を音声特徴量の補正法で取り除くことで、雑音に対する音声認識の頑健性をより高めています。
ディスプレイの隣にあるスピーカから妨害音が出力されている状態で、音声認識により電動車いすを操作しています。
シートに座っているユーザの音声コマンドのみに反応し、周囲にいる人の音声コマンドには反応しません。

Copyright(c) 2007 Akira Sasou All Rights Reserved.